JMDM-2038źaÆ·ÊÇÒ»·NŒŻłÉ¶àčŠÄÜĐÍÈËCœçĂæșÍÎÆŹCżŰÖÆÆśÒ»ówCŁŹÊÇĿǰIÈÒ»żîœß^¶àÄêŽóÒÄŁłÉÊì”Äč€IȘÓĂĄąŸßÓĐżčžÉ_ÄÜÁŠĄąčŠÄÜŽóĄą·¶šżÉżż”Äč€IżŰÖÆÆśĄŁËüÓČŒțČÉÓĂŸßÓĐžßĐÔÄÜĄąč€IŒe”ÄßMżÚÎÆŹCŒ°ÁăČżŒțĄąŁI”Ä·¶šĐÔĄążčžÉ_ë·ÔOÓŁŹÜŒțČÉÓĂCŐZŃÔŸłÌŁŹŸßÓĐÁŒșÔĿÉUŐčĐÔŁŹżÉŹF¶à·NčŠÄÜŁșżÉÍšß^Ë{É«žßÇćÒșŸ§ÆÁÈËCœ»»„œçĂæÉÏ”Ä10ĘpÓ|é_êPÔÚŸÔOÖĂ
ą”ŁŹŹFżŰÖÆëŽĆéyĄąâžŚĄąśžĐÆśĄąœÓœüé_êPĄą»ô é_êP”ÈŁ»°ćÉÏÓĐžßŸ«¶È”ÄADČÉŒŻĐŸÆŹŁŹŚîžßß_”œ18λ(λ”žùțĐèÒȘżÉÜŒțŐ{Őû)Ł»§4·20KHZ”ÄPWMĘłöŁŹżÉĂ}Ő{ÖÆżŰÖÆŁŹżÉÒÔÍŹrżŰÖƶțÂ·ČœßMËĆ·țëCÂÓŁŹßmÓĂÓÚžś·NëŽĆĄąžßîlžÉ_”ÈhŸłșÁÓ”Äč€IöșÏŁŹ JMDM-2038č€IżŰÖÆÆśÒÔ·¶šżÉżżĄąžßĐÔr±ÈșÍź”ÄĐÔÄܱíŹFOŽó”ŰÌážßÁËżÍô”ÄÉúźaЧÂÊșÍœúЧÒæĄŁ
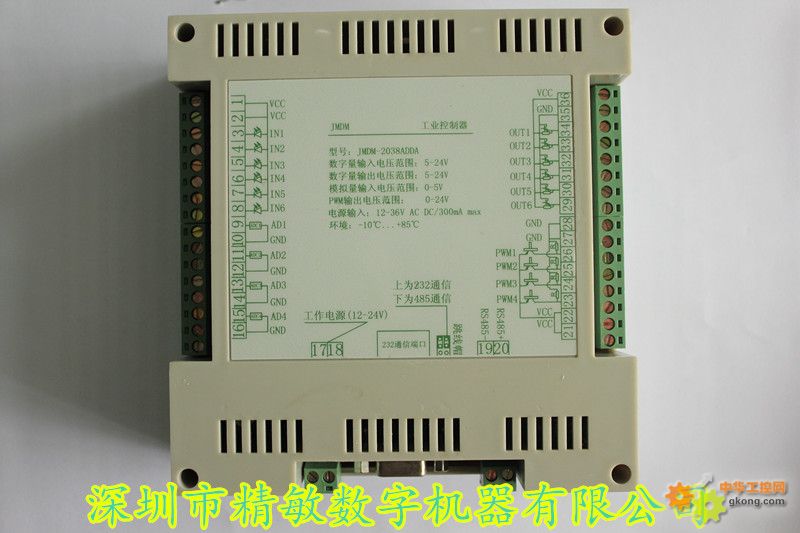
Ò»ĄąJMDM-2038źaÆ·čŠÄÜœéœB
ąń.JMDM-2038Ă}Ő{ÖÆĐÍÌŁšJMDM-2038ADPWMŁ©ÓĐÒÔÏÂčŠÄÜŁș
(1)ÓĐ12·čâëžôëx”ŚÖÁżĘÈëĘłöĄŁ
6·ĘÈëŁșNPN ĘÈëĐÎÊœŁŹĘÈëëÁśé10mAŒŽżÉŁŹÄŹŐJ12V--24V”Äé_êPÁżĘÈëzyŁŹ5Vé_êPÁżĘÈëzyĐ趚ŚöĄŁ6·ĘÈëżÉÒÔŚśéĐĐłÌÏȚλé_êPĄąŒtÍâśžĐÆśĄąœÓœüé_êPĄą°Žâo”È”ÄzyĄŁ
6·Ÿ§ówčÜĘłöŁșŚîŽóÿ·ʳöÄÜłĐÊÜ4AëÁśĄŁĘłö”ÍëÆœÓĐЧĄŁżÉòÓ5---30VÖźég而ś”ÄŰĘdĄŁ
żÉÒÔÓĂíżŰÖÆëŽĆéyĄąëŽĆÀ^ëÆśĄąčÌBÀ^ëÆśĄąâžŚ”ÈŰĘdĄŁ
(2)4·čâëžôëxPWMĘłöĄŁPWMĘłö而śëșé12VĄŁżÉÓĂÓÚżŰÖƱÈÀęéyĄąIGBT”ÈĄŁîlÂÊ·¶úé(1HZĄ«20KHZ)Ł»ŐŒżŐ±ÈżÉÒÔŸłÌÔO¶šŁŹŐŒżŐ±È·¶úé(0.000Ą«1.000)ĄŁżÉÓĂÓÚŒ€čâëÔŽÄÜÁżżŰÖÆĄąIGBTżŰÖÆ”ÈĂ}Ő{ÖÆöșÏŁŹDAĘłöżŰÖÆöșÏĄŁ
- ÓĐ4·žßËٞߟ«¶ÈADÄŁMÁżzyÍš”ÀĄŁzyëș·¶úÊÇ0--5VĄŁżÉÒÔ¶šŚöłÉ0--10VzyÁżłÌĄŁ
ADλ”żÉÒÔÍšß^ÜŒțíĐȚžÄŁŹżÉžÄλ”é12λĄą14λĄą16λșÍ18λĄŁzyËٶȷÖeé4msĄą20msĄą60msșÍ245msĄŁIICżŸŚxÈĄ”ț·œÊœĄŁżÉÓĂÓÚÄŁMÁż”ÄzyżŰÖÆŁŹÈçëșŁŹëÁśŁŹŰ¶ÈŁŹń¶ÈŁŹșÁŠ”ÈÄŁMÁżĐĆÌ”ÄzyżŰÖÆŁ»
ąò.JMDM-2038ÄŁMÁżżŰÖÆĐÍÌŁšJMDM-2038ADDAŁ©ÓĐÒÔÏÂčŠÄÜŁș
(1)ÓĐ12·čâëžôëx”ŚÖÁżĘÈëĘłöĄŁ
6·ĘÈëŁșNPN ĘÈëĐÎÊœŁŹĘÈëëÁśé10mAŒŽżÉŁŹÄŹŐJ12V--24V”Äé_êPÁżĘÈëzyŁŹ5Vé_êPÁżĘÈëzyĐ趚ŚöĄŁ6·ĘÈëżÉÒÔŚśéĐĐłÌÏȚλé_êPĄąŒtÍâśžĐÆśĄąœÓœüé_êPĄą°Žâo”È”ÄzyĄŁ
6·Ÿ§ówčÜĘłöŁșŚîŽóÿ·ʳöÄÜłĐÊÜ4AëÁśĄŁĘłö”ÍëÆœÓĐЧĄŁżÉòÓ5---30VÖźég而ś”ÄŰĘdĄŁ
żÉÒÔÓĂíżŰÖÆëŽĆéyĄąëŽĆÀ^ëÆśĄąčÌBÀ^ëÆśĄąâžŚ”ÈŰĘdĄŁ
(2)4·DAĘłöĄŁDAĘłö而śëșé0V-10VĄŁżÉÓĂÓÚżŰÖƱÈÀęéyĄąIGBT”ÈĄŁîlÂÊ·¶úé(1HZĄ«20KHZ)Ł»ŐŒżŐ±ÈżÉÒÔŸłÌÔO¶šŁŹŐŒżŐ±È·¶úé(0.000Ą«1.000)ĄŁżÉÓĂÓÚŒ€čâëÔŽÄÜÁżżŰÖÆĄąIGBTżŰÖÆ”ÈĂ}Ő{ÖÆöșÏŁŹDAĘłöżŰÖÆöșÏĄŁ
- ÓĐ4·žßËٞߟ«¶ÈADÄŁMÁżzyÍš”ÀĄŁzyëș·¶úÊÇ0--5VĄŁżÉÒÔ¶šŚöłÉ0--10VzyÁżłÌĄŁ
DAĘłö”ÄŸ«¶ÈÊÇ12λŁŹDAĘłöÚ
·régé4.5µsĄŁIICżŸŚx”ț·œÊœĄŁżÉÓĂÓÚÄŁMÁż”ÄĘłöżŰÖÆŁŹÈçëșŁŹëÁśŁŹŰ¶ÈŁŹń¶ÈŁŹșÁŠŁŹëCȚDËÙ”ÈÄŁMÁżĐĆÌ”ÄżŰÖÆŁ»

ąó.JMDM-2038ëCżŰÖÆĐÍÌŁšJMDM-2038MŁ©ÓĐÒÔÏÂčŠÄÜŁș
(1)ÓĐ18·čâëžôëx”ŚÖÁżĘÈëĘłöĄŁ
12·ĘÈëŁșNPN ĘÈëĐÎÊœŁŹĘÈëëÁśé10mAŒŽżÉŁŹÄŹŐJ12V--24V”Äé_êPÁżĘÈëzyŁŹ5Vé_êPÁżĘÈëzyĐ趚ŚöĄŁ12·ĘÈëżÉÒÔŚśéĐĐłÌÏȚλé_êPĄąŒtÍâśžĐÆśĄąœÓœüé_êPĄą°Žâo”È”ÄzyĄŁ
6·Ÿ§ówčÜĘłöŁșŚîŽóÿ·ʳöÄÜłĐÊÜ4AëÁśĄŁĘłö”ÍëÆœÓĐЧĄŁżÉòÓ5---30VÖźég而ś”ÄŰĘdĄŁ
żÉÒÔÓĂíżŰÖÆëŽĆéyĄąëŽĆÀ^ëÆśĄąčÌBÀ^ëÆśĄąâžŚ”ÈŰĘdĄŁ
(2) 2·Ă}_ĐĆÌĘłöĄą2··œÏòĐĆÌĘłöŁŹżÉÍŹrżŰÖÆÉÂ·ČœßM»òËĆ·țëCŚśßBÓß\ÓŁŹÁíÓĐßÓĐһ·żÉłÌżŰîlÂÊĐĆÌĘłöŁŹÓĂÓÚÒ»Đ©Ő{ËÙ”ÈżŰÖÆöșÏĄŁ
ąô.JMDM-2038ŸŽaÆśŚxÈĄĐÍÌŁšJMDM-2038PMŁ©ÓĐÒÔÏÂčŠÄÜŁș
(1)ÓĐ18·čâëžôëx”ŚÖÁżĘÈëĘłöĄŁ
12·ĘÈëŁșNPN ĘÈëĐÎÊœŁŹĘÈëëÁśé10mAŒŽżÉŁŹÄŹŐJ12V--24V”Äé_êPÁżĘÈëzyŁŹ5Vé_êPÁżĘÈëzyĐ趚ŚöĄŁ12·ĘÈëżÉÒÔŚśéĐĐłÌÏȚλé_êPĄąŒtÍâśžĐÆśĄąœÓœüé_êPĄą°Žâo”È”ÄzyĄŁ
12·čâëžôëxÖĐ”ÄÇ°Áù·żÉÒÔœÓÊÜ3·ABÏàŐęœ»Ă}_”ÄŸŽaÆśĐĆÌĘÈ륣
6·Ÿ§ówčÜĘłöŁșŚîŽóÿ·ʳöÄÜłĐÊÜ4AëÁśĄŁĘłö”ÍëÆœÓĐЧĄŁżÉòÓ5---30VÖźég而ś”ÄŰĘdĄŁ
żÉÒÔÓĂíżŰÖÆëŽĆéyĄąëŽĆÀ^ëÆśĄąčÌBÀ^ëÆśĄąâžŚ”ÈŰĘdĄŁ
(2) 6·Ÿ§ówčÜĘłöŁșŚîŽóÿ·ʳöÄÜłĐÊÜ4AëÁśĄŁĘłö”ÍëÆœÓĐЧĄŁżÉòÓ0---5VÖźég而ś”ÄŰĘdĄŁ
żÉÒÔÓĂíÒ»Đ©”ÍșĐĆÌșÍŰĘdĄŁ
JMDM-2038Ă}Ő{ÖÆĐÍÌŁšJMDM-2038ADPWMŁ©șÍJMDM-2038ÄŁMÁżĐÍÌŁšJMDM-2038ADDAŁ©șÍJMDM-2038ëCżŰÖÆĐÍÌŁšJMDM-2038MŁ©șÍJMDM-2038ŸŽaÆśŚxÈĄĐÍÌŸùŸßäÒÔÏÂčŠÄÜŁș
- ÓĐÒ»12864ÒșŸ§ï@ÊŸÆÁŁŹÁÁ¶ÈżÉŐ{ĄŁżÉï@ÊŸ4ĐĐ6ÁĐËÊhŚÖĄŁ±łčâôżÉÒÔÍšß^ÜŒțé_ąșÍêPé]ĄŁ
§ÓĐRS485ÍšĐƶˌÓșÍRS232ÍšĐƶ˿ڣŹRS232șÍRS485żÉÒÔÍšß^ÉÌűŸĂ°íßMĐĐÇĐQĄŁ
- RS232żÉÒÔęäłÌĐòŁŹęäłÌĐòČ»±ŰÊčÓĂŁéT”ÄęäÆśĄŁ
- ÓĐÒ»·äűQÆśĘłöŁŹżÉÒÔÓĂÓÚóŸŻÌáĐŃĄŁ
(8)íÓĐ10°ŽâoĂæ°ćżÉÒÔÔOÖĂ
ą”ĄŁ
JMDM-CON2038żÉÓĂÓÚžś”ŚÖÁżĘÈëĘłö”ÄżŰÖÆÏ”œyŁŹżÉżŰÖÆ➌ĄąëŽĆéyĄąÀ^ëÆś”ÈŁ»żÉÍâœÓžś·NśžĐÆśŁŹżÉżŰÖÆČœßMëCșÍËĆ·țëCŁŹÒČżÉÓĂÓÚÌæŽúPLCÓĂÓÚžś·NżŰÖÆöșÏŁšÈçžś·NCÆśżŰÖÆŁ©ŁŹčŠÄÜÉϱÈPLCŒÓÎıŸï@ÊŸÆśžüéŽóĄąì`»îĄŁĐÔÄÜ·¶šŁŹĐÔr±ÈžßĄŁ
3ĄąȘÓĂöșÏ
ĿǰÒŃV·șȘÓĂÓÚ➌ĄąëŽĆéyĄąÀ^ëÆśĄąșÁŠyÔxĄąÒșșżŰÖÆÆśĄąŒ€čâżŰÖÆÆśĄąČœßMËĆ·țżŰÖÆĄą¶à¶Î¶àÂ·Ű¶ÈżŰÖÆÆśĄąŸŽaÆśzyżŰÖÆ”ÈÒȘÇóžßŸ«¶ÈĄąžßËٶȔÄč€IhŸłșÍÔOäÉÏŁŹß\ĐĐ·¶šżÉżżŁŹłÉčŠ”ŰœÊÜÁËșÁÓč€IhŸłöșÏ”ÄëŽĆĄąžßîlžÉ_”ÄżŒòŁŹÒÔžßĐÔr±ÈÚA”ĂÁËVŽóżÍô”ÄĐĆÙŁŹČąßhäNșŁÈÍ⥣
1Ąą8λžßĐÔÄÜÎÆŹCŚśéÖśżŰÖÆĐŸÆŹŁŹłÌĐòżŐégé64KŁ»
2Ąą32KŚÖč”Ä”țŽæŠÆśŁŹżÉÒÔÓĂí±ŁŽæ
ą””È”țŁŹàë”țČ»GʧŁ»
3ĄąîAÁôIICżŸœÓżÚżÉÒÔșžœÓ24C02”ÈÏ”ÁДĎæŠĐŸÆŹŁ»
4ĄążŰÖÆÆśč€ŚśëÔŽŁșËĆä24VÖ±Áś1Aé_êPëÔŽĄŁ12V-30VÖ±Áś(»ò9V-20Vœ»Áś)ÖźégŸùżÉÒÔŐ곣ß\ĐĐŁ»
5ĄąÓĐ1 ·ËÊ”ÄRS232 ŽźĐĐÍšĐĆœÓżÚŁŹżÉÒÔĆcëÄX”ÈÉÏλ܌țÍšĐĆŁŹÒČżÉĆc¶àżŰÖÆÆśÖźégÂC而śĄŁżÉÒÔÍšß^lŸĂ±ÇĐQłÉRS485ßMĐĐÍšĐĆŁŹżÉÓĂÓÚ¶àCœMŸWŁ»
6ĄążÉÖ±œÓÍšß^RS232œÓżÚÏÂĘdłÌĐòŁŹoĐèęäÆśŁŹ·œ±ăłÌĐòĐȚžÄĄąÉęŒŁ»
7ĄąÏ”œyČÉÓĂčâëžôëxșÍąÓĂÈČżżŽéTč·Œ°Àžń”ÄžßîlVłęÌŰĐÔŁŹČąÓĐŁI”ÄëÔŽ±OżŰë·ÊčÏ”œy而ś·¶šżÉżżŁŹoËÀCŹFÏóŁ»
8Ąą128*64ÒșŸ§Ë{ÆÁï@ÊŸŁ»Ò»ÆÁżÉï@ÊŸ6*4hŚÖŁ»ÒČżÉï@ÊŸDĐΔŚÖ·ûÌ”ÈŁ»
9ĄąÓĐ10ĘpÓ|°ŽæIŁŹżÉÔÚŸÔOÖĂ
ą”Ł»
10ĄąÍâĐγߎçŁșŸoĐÍC€ŁŹżŰÖÆÆśC€łßŽçŁș150mm*145mm*55mmŁŹ°ČŃbłßŽçŁș145mm*140mmŁŹżÉÓĂĆäÌŚ”Äă~żš°ČŃbŁ»
11ĄąÓĂKeil CŸłÌŁŹÓĂôŸłÌÓĐÀ§ëy”ĿɰŃč€ËÁśłÌ°lœoÎÒËŸŁŹÎÒËŸżÉŽúéé_°lłÌĐòĄŁ
- 而śŰ¶ÈŁș-10~+65°CŁ»
- ŠŽæŰ¶ÈŁș-20~+80°C Ł»
- ń¶ÈŁș5~95% oÄęœY Ł»
- čŠșÄ(oÍâČżÔOä)Łș+24VĄą1A (”äĐÍÖ”) Ł»
4.1ï@ÊŸșŻ”
void io_init(void); //łőÊŒ»ŻIOżÚ
void LcmInit( void ); //ÒșŸ§ÆÁłőÊŒ»Ż
void LcmPutBMP( unsigned char *puts ); //Ő{ÓĂï@ÊŸźĂæŁ»
ÈçŁșLcmPutBMP(Workbmp); //Ő{ÓĂï@ÊŸźĂæ“Workbmp”
void LcmReverseBMP( void ); //ÆÁÄ»·ŽÏàï@ÊŸ
void disp_char(unsigned char xp,unsigned char yp,unsigned char chr,bit col);
čŠÄÜŁșï@ʟΔŚÖĄŁ
ŐfĂśŁșżÉï@ÊŸŁș"‘0’Ąą‘1’Ąą‘2’Ąą‘3’Ąą‘4’Ąą‘5’Ąą‘6’Ąą‘7’Ąą‘8’Ąą‘9’Ąą‘.’Ąą‘+’Ąą‘-’Ąą‘ ’Ąą‘:’"ĄŁ·ÖeŠȘchr”Ĕ֔éŁș0Ąą1Ąą2Ąą3Ąą4Ąą5Ąą6Ąą7Ąą8Ąą9Ąą10Ąą11Ąą12Ąą13Ąą14ĄŁ
disp_char( XĘSŚűË, ŁÙĘSŚűË, ËùÒȘï@ÊŸ”Ä”ŚÖ, ·ŽÉ«); X·¶ú:0--128 Y·¶ú:0,2,4,6ĄŁ
ĆeÀęŁșdisp_char(112,6,7,1);
void disp_character(unsigned char xp,unsigned char yp,unsigned char*puts,bit col);
čŠÄÜŁșï@ÊŸŚÖ·ûŁŹżÉŚÔĐжšÁxÈÎÒâŚÖ·ûŁŹÈĄÄŁÜŒțÉúłÉŒŽżÉĄŁ
ŐfĂśŁșdisp_character( XĘSŚűË,ŁÙĘSŚűË,ÒȘï@ÊŸ”Ä”œMÖžá,·ŽÉ«);
ĆeÀęŁșdisp_character(104,6,ASC_A,0);
void disp_HZ(unsigned char xp,unsigned char yp,unsigned char*puts,bit col); //ï@ÊŸÎhŚÖ
ÈçŁșdisp_HZ(72,2,zhong,0);
void disp_float(unsigned char xp,unsigned char yp,unsigned long your_data,unsigned char bit_T,unsigned char bit_int,bit hue); //ï@ÊŸžĄüc”
ŐfĂśŁșdisp_float ( XĘSŚűË, ŁÙĘSŚűË, ÒȘï@ÊŸ”Ä”ț, żÎ»”, Őû”λ”,·ŽÉ«);
ĆeÀęŁșdisp_float(104,6,lost_pa,7,3,0);
void disp_int(unsigned char xp,unsigned char yp,unsigned long your_data,unsigned char bit_T,bit hue); //ï@ÊŸŐû”
void disp_int( XĘSŚűË, ŁÙĘSŚűËŁŹÒȘï@ÊŸ”Ä”ț, żÎ»”, ·ŽÉ«);
ÈçŁșdisp_int(160,0,now_count,4,0);
void disp_var(unsigned char xp, unsigned char yp,unsigned int your_data,unsigned char bit_int,bit hue); //ï@ÊŸ”Ö”
void disp_var( XĘSŚűË, ŁÙĘSŚűË, ÒȘï@ÊŸ”Ä”ț, żÎ»”, ·ŽÉ«); ÈçŁșdisp_var(140,0,hours,5,0);
unsigned char edit(char bitnum,char page,unsigned char xdata *add_para,unsigned char *add_bk);
unsigned char edit(
ą”λ”,íŽa,
ą””ŰÖ·Öžá,
ą”ÔOÖĂíĂæ”Ä”œMÖžá);
ÈçŁșa=edit(23,0,0x2000,Workbmp1);
4.2 ĘÈ륹ʳöșŻ”
IN1 ĄąIN2ĄąIN3 ……IN5ĄąIN6 ĘÈëücŁš”Ú1”œ”Ú6ücŁ©
ÈçŁșIN1==0éÓĐĘÈ룏IN1!=0éoĘÈ륣
void out_bit(unsigned char num,bit value);//void out_bit(Ęłöüc,λ֔);
DOĘłö(0 ÊÇé_Ęłö,1ÊÇêPĘłö) ĘłöücŁš”Ú1”œ”Ú8ücŁ©
ÈçŁș
out_bit(1,0); //ĘłöÒ»é_ out_bit(1,1); //ĘłöÒ»êP
……
out_bit(6,0); //Ęłö¶țé_ out_bit(6,1); //Ęłö¶țêP
out_bit(7,1);//é_ÒșŸ§ÆÁ out_bit(7,0);//êPÒșŸ§ÆÁ
out_bit(8,1);//é_·äűQÆś out_bit(8,0);//êP·äűQÆś
void IIC_MCP3424_Init(void);//łőÊŒ»ŻAD
void IIC_MCP3424_CHANGE_CHL(unsigned char channel);// 17msČĆÄÜ·¶š ÇĐQÍš”ÀĐèégžô20msŁŹłöSÄŹŐJ14λADĄŁÀęÈçŁșIIC_MCP3424_CHANGE_CHL(1);ÇĐQéADÍš”ÀÒ»ĄŁ20msÒÔșóÔÚŐ{ÓĂADŚxÈĄșŻ”ĄŁ
unsigned int IIC_MCP3424_READ(void)//ŚxÈĄADÍš”À”ÄADÖ”ĄŁ
4.3 ŃÓrșŻ”
void delay_ms(unsigned int a);//ÈçŁșdelay_ms(100); //ŃÓr100ms
void delayus(unsigned char us);//ÈçŁșdelayus(50); //ŃÓr50us
4.4 ”ț±ŁŽæĄąŚxÈĄșŻ”
unsigned long read_data(unsigned char xdata *address,unsigned char bytenum); //”țŚxÈĄ
ÈçŁșnow_count=read_data(0x3000,4); //ą0x3000 ”ŰÖ·”ÄÈÈĘŚx”œŚÁżnow_countÖĐ
Void save_data(unsigned char xdata *address,unsigned long your_data,unsigned char bytenum); //”ț±ŁŽæŁ»Èç:save_data( 0x3000,now_count, 4 );//ąŚÁżnow_count”ÄÖ”±ŁŽæ”œ0x3000”ŰÖ·ÖĐÈ„ĄŁ
ŚxÈĄșͱŁŽæÊÇČÙŚś”ÄÊźßMÖÆ”ĄŁ
4.5 ß\ÓżŰÖƌĎæÆśŐfĂś
XSPEED XĘSËÙ¶ÈżŰÖƌĎæÆś
XPOS XĘSĂ}_”żŰÖƌĎæÆś
XSTA XĘS·œÏòżŰÖƌĎæÆś
XSTOP XĘSß\ĐĐ îBżŰÖƌĎæÆś
YSPEED YĘSËÙ¶ÈżŰÖƌĎæÆś
YPOS YĘSĂ}_”żŰÖƌĎæÆś
YSTA YĘS·œÏòżŰÖƌĎæÆś
YSTOP YĘSß\ĐĐ îBżŰÖƌĎæÆś
ZSPEED ZĘSËÙ¶ÈżŰÖƌĎæÆś
ZSTA ZĘS·œÏòżŰÖƌĎæÆś
ZSTOP ZĘSß\ĐĐ îBżŰÖƌĎæÆś
4.6 ÄŁMÁżĘÈëĘłöșŻ”ŐfĂś:
void IIC_MCP3424_Init(void); //łőÊŒ»ŻADČÉÓĐŸÆŹŁ» void IIC_MCP3424_CHANGE_CHL(unsigned char channel); //ÔO¶šADČÉÓÍš”ÀŁ»
unsigned int IIC_MCP3424_READ(void);//,unsigned char step); //ŚxÈĄADČÉÓÖ”Ł»
void DAC_MCP4822(unsigned char channel,unsigned int dac_data); //DA ĘłöșŻ”Ł»
Ç°Ăæ”ÄÊÇÍš”À”ŁŹșóĂæ”ÄÊÇÄŁMÁżĘłöÖ”ĄŁ
4.7 ŸŽaÆśČÙŚśșŻ”:
#define PMXCLR XBYTE[0xA10C] ”Úһ·ŸŽaÆśÇćÁă
#define PMYCLR XBYTE[0xA10D] ”Ú¶ț·ŸŽaÆśÇćÁă
#define PMZCLR XBYTE[0xA10E] ”ÚÈę·ŸŽaÆśÇćÁă
unsigned long read_recoder(unsigned char recnum); //ŚxŸŽaÆśșŻ”,ecnumÌÊÇŸŽaÆś”Ä·”,·”»Ű”ÄÊÇŸŽaÆś”Ĕ֔ĄŁ
4.8 ÆäÓàșŻ”ŐfĂś
void Led_ON(void); //LEDé_
void Led_OFF(void); //LEDêP
void LcmClear( void ); //ÇćÆÁ

žü¶àŒŒĐgÙYÓgÓíëÔÔŁșÉîÛÚŸ«Ăô”ŚÖCÆśÓĐÏȚč«ËŸ ---ÀîĐlŒt 13427969290 0755-29769287
QQŁș2355735131 à]ÏäŁșjingmingk@163.com


