




ėó═■“v╦┼Ę■DA200²łķT═¼▓Įį┌ÕaĖÓėĪ╦óÖCĄ─æ¬ė├


ĪŠš¬ę¬Ī┐:▒Š╬─ų„ę¬ĮķĮBėó═■“vDA200Ė▀ąį─▄Į╗┴„╦┼Ę■ŽĄĮyæ{ĮĶŲõĖ▀Š½Č╚ĪóĖ▀Ēææ¬ĪóĖ▀ąįār▒╚Ą─«aŲĘ╠ž³c║═ā׫ɹį─▄,æ¬ė├į┌²łķT═¼▓ĮĄ─ÕaĖÓėĪ╦óÖC╔ŽŻ¼┌AĄ├┴╦┐═æ¶Ą─šJ┐╔ĪŻ
ĪŠĻPµIūųĪ┐:ėó═■“vDA200╦┼Ę■ ²łķT═¼▓Į Č©╬╗Š½┤_ Ė▀╦┘Ēææ¬
1.įOéõ║åĮķ
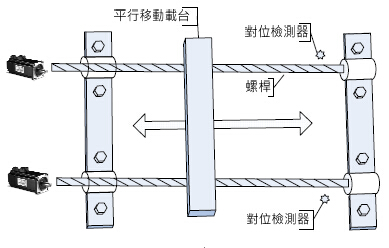
╚½ūįäėÕaĖÓėĪ╦óÖCę╗░Ńė╔čb░µĪó╝ėÕaĖÓĪóē║ėĪĪó▌öļŖ┬Ę░ÕĄ╚ÖCśŗĮM│╔ĪŻ╦³Ą─╣żū„įŁ└Ē╩ŪŻ║Ž╚īóę¬ėĪ╦óĄ─ļŖ┬Ę░Õ╣╠Č©į┌ėĪ╦óČ©╬╗┼_╔ŽŻ¼╚╗║¾ė╔ėĪ╦óÖCĄ─ū¾ėę╣╬ĄČ░čÕaĖÓ╗“╝t─z═©▀^õōŠW┬®ėĪė┌ī”æ¬║Ė▒PŻ¼ī”┬®ėĪŠ∙ä“Ą─PCB,═©▀^é„▌ö┼_▌ö╚ļų┴┘NŲ¼ÖC▀Mąąūįäė┘NŲ¼Ż¼▒ŠįOéõļpY▌S×ķĮzŚU▀BĮėĄ─²łķTĮYśŗŻ¼į┌Ė▀╦┘Č©╬╗Ą─▀^│╠ųąę¬▒Ż│ųā╔▀ģ╦┘Č╚ę╗ų┬Ż¼▀@Š═ąĶę¬╦┼Ę■Ħėą²łķT═¼▓ĮĄ─╣”─▄Ż╗

łD▒Ē1
2Ż«²łķT═¼▓Į║åĮķ
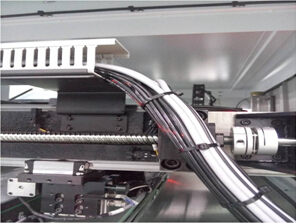
²łķT═¼▓ĮĄ─╩╣ė├Ż¼ųž³cį┌┐žųŲā╔éĆęŲäėŲĮ┼_Ą╚╦┘ęŲäėŻ¼╚¶ā╔▌SķgĄ─ęŲäėėą╠½┤¾Ą─▓Ņ«É┴┐Ż¼ätĢ■įņ│╔ÖCśŗĄ─ōpē─Ż¼ę“┤╦ā╔▌Sų«ķgĄ─═¼▓ĮęŲäė┐žųŲ×ķ²łķT═¼▓Į╩╣ė├Ą─Ą┌ę╗ę¬äšĪŻ
łD▒Ē2
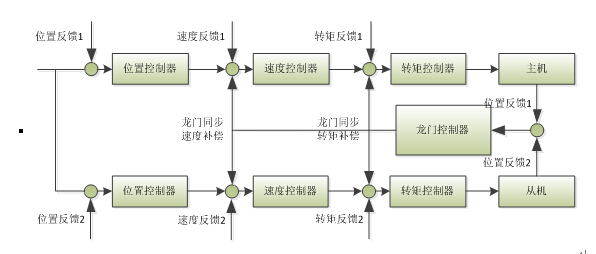
INVTĄ─DA200ŽĄ┴ą╦∙╠ß╣®Ą─²łķT═¼▓Į┐žųŲ╣”─▄Ż¼ūī╩╣ė├š▀Ēś└¹Ą─▀_│╔ąĶŪ¾Ż¼“īäėŲ„īóūįąą═¼▓Į┐žųŲŻ¼«ö╬╗ų├Ų½▓Ņ│¼▀^įOČ©Ą─į╩įSųĄĢrŻ¼ätĢ■░l│÷Š»ĖµŻ¼═Żų╣ŽĄĮy▀\ąąĪŻP4.33[╬╗ų├│¼▓Ņ├}ø_ĘČć·]┐╔ęįįOų├ł¾Š»Ą─╬╗ų├│¼▓ŅķōųĄĪŻ²łķT═¼▓Į┐žųŲę╗éĆųž³cų„ę¬į┌ė┌╩ūŽ╚ę¬▒ŻūCū¾ėę²łķT╝▄Ą─ŲĮąąąįŻ¼Ą┌ę╗▓ĮŠ═ąĶę¬═©▀^╗žįŁ³c╣”─▄░č²łķT╝▄ö[ų▒Ż¼╗žįŁ³cĄ─▀^│╠╔Ž╬╗ÖCų╗Įo│÷ę╗éĆ╗žįŁ³cą┼╠¢Įoū¾ėęā╔┼_╦┼Ę■Ż¼į┌┼÷ĄĮū¾ėęā╔éĆįŁ³cķ_ĻP║¾Ż¼║¾├µĄ─äėū„Š∙ėą╦┼Ę■üĒ═Ļ│╔╗žįŁ³cäėū„Ż╗╩ūŽ╚╔Ž╬╗ÖCĮoĘųäe═¼ĢrĮo│÷ų„ÖC║═Å─ÖC╗žįŁ³cą┼╠¢Ż¼ų„ÖCŻ©Å─ÖCŻ®Ž╚┼÷ĄĮįŁ³cĖąæ¬Ų„║¾═Żų╣Ż¼Ą╚┤²Å─ÖC┼÷ĄĮįŁ³cĖąæ¬Ų„Ż¼ā╔éĆą┼╠¢═¼Ģrėąą¦║¾═¼Ģr═∙║¾▀\ąą1╚”Ż©P6.38=10000Ż®ūī║¾į┘═∙Ū░═¼Ģr▀\ąąų▒ĄĮ┼÷ĄĮĖąæ¬ķ_ĻP═ŻŽ┬üĒŻ¼Ų┌ķgį┌╗žįŁ³c▀^│╠ųąų„ÖCę╗ų▒ĮoÅ─ÖC²łķTĮŌ│²ą┼╠¢Ż¼ī”╬╗═Ļ│╔║¾Įo│÷²łķT═¼▓Įą┼╠¢Ż╗²łķT╝▄ī”╬╗═Ļ│╔║¾ė╔╔Ž╬╗ÖCūŅĮKĮo│÷ÖCąĄ╗žįŁ³cą┼╠¢Ż╗DA200ā╚ų├6ĘNæ¬ė├į┌▓╗═¼╣ż┐žŽ┬Ą─╗žįŁ³c─Ż╩Į╣®┐═æ¶▀xō±ĪŻ
łD▒Ē3
3.²łķT┐žųŲįŁ└Ē:
╚ńŽ┬łD╦∙╩ŠŻ¼²łķT═¼▓Į┐žųŲŲ„Ģ■īŹĢrūx╚Īų„ÖC┼cÅ─ÖCĄ─╬╗ų├ą┼╠¢Ż¼Å─Č°Ą├│÷ų„ÖC┼cÅ─ÖCĄ─╬╗ų├┼c╦┘Č╚▓ŅųĄŻ¼╚╗║¾▌ö│÷╦┘Č╚┼c▐DŠžčaāöųĖ┴ŅŻ¼ęį▀_ĄĮų„ÖC┼cÅ─ÖC═¼▓Į▀\ąąĄ─ą¦╣¹ĪŻ
Ė∙ō■īŹļHŽĄĮyįOų├ų„ÖCĄ─P6.31ĄĮP6.35.

łD▒Ē4
4Ż║ļŖÜŌĮėŠĆŻ╗
ų„ÖCŻ║├}ø_ą┼╠¢.Å─ÖCĘųŅl▌ö│÷.╦┼Ę■ł¾Š».įŁ³cåóäėŻ©DI1Ż®.įŁ³cĖąæ¬Ų„Ż©DI2Ż®.╗žįŁ³c═Ļ│╔Ż©D01Ż®.²łķT═¼▓ĮĮŌ│²Ż©DO2Ż®
Å─ÖCŻ║├}ø_ą┼╠¢.ų„ÖCĘųŅl▌ö│÷.╦┼Ę■ł¾Š».įŁ³cĖąæ¬Ų„Ż©DI2Ż®²łķT═¼▓ĮĮŌ│²Ż©DI3Ż®
|
ų„ÖCĮėŠĆ |
|||||
|
ĮŪ╬╗ |
Č©┴x |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
23 |
PULSE+ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
24 |
PULSE- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
32 |
SIGN+ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
33 |
SIGN- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
2 |
V24+ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
12 |
V24- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
15 |
╣╩šŽł¾Š» |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
44 |
0A+ |
ĪĪ |
3 |
EXA+ |
Å─ÖCCN5Č╦ |
|
43 |
OA- |
ĪĪ |
4 |
EXA- |
|
|
41 |
OB+ |
ĪĪ |
10 |
EXB+ |
|
|
42 |
OB- |
ĪĪ |
9 |
EXB- |
|
|
16 |
ų„ÖC╗ž┴Ńåóäė |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
37 |
ų„ÖCįŁ³cķ_ĻP |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
9 |
²łķTĮŌ│² |
▌ö│÷ĮoÅ─ÖC |
ĪĪ |
ĪĪ |
ĪĪ |
|
14 |
╗žįŁ³c═Ļ│╔ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
10 |
Å─ÖCįŁ³cķ_ĻP |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
Å─ÖCĮėŠĆ |
|||||
|
ĮŪ╬╗ |
Č©┴x |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
23 |
PULSE+ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
24 |
PULSE- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
32 |
SIGN+ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
33 |
SIGN- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
2 |
V24+ |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
12 |
V24- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
15 |
╣╩šŽł¾Š» |
ĪĪ |
3 |
EXA+ |
ų„ÖCCN5Č╦ |
|
44 |
0A+ |
ĪĪ |
4 |
EXA- |
|
|
43 |
OA- |
ĪĪ |
10 |
EXB+ |
|
|
41 |
OB+ |
ĪĪ |
9 |
EXB- |
|
|
42 |
OB- |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
16 |
Å─ÖC╗ž┴Ńåóäė |
ĪĪ |
ĪĪ |
ĪĪ |
ĪĪ |
|
10 |
²łķTĮŌ│² |
Įė╩š ų„ÖC▌ö╚ļ |
ĪĪ |
ĪĪ |
ĪĪ |
5.╦┼Ę■š{įć▓Į¾EŻ║
-
P6.30┤“ķ_²łķT═¼▓Įķ_ĻPŻ╗
-
Ė∙ō■IO┐┌Ą─ĮėŠĆ┤_Č©ų„ÖC║═Å─ÖCŻ©P6.37Ż®
-
P4.62╣Ō¢┼│▀ĘĮŽ“┼cļŖÖCĘĮŽ“ę╗ų┬Ż╗
-
į┌ŠĆīW┴ĢÖCąĄæT┴┐Ż©┐╔═©▀^R0.51ė^▓ņÖCąĄīŹĢržō▌dæT┴┐▒╚Ż®
-
Ė∙ō■īŹļHŪķørš{įćį÷굯╗
-
Ė∙ō■ŪķørįOų├P4.64ģóöĄŻ©┐╔═©▀^R0.53▓ķ┐┤²łķT═¼▓Į╬╗ų├Ų½▓ŅųĄŻ®
-
Ė∙ō■īŹļHŪķør┐┤╩ŪʱąĶę¬╚ĪĘ┤²łķT═¼▓Įī”╬╗ĘĮŽ“Ż©P6.41Ż®║═²łķT═¼▓Įī”╬╗║¾═╦ŠÓļxŻ©P6.37Ż®
Š▀¾wģóöĄįOų├╚ńŽ┬Ż║
|
ų„ÖC |
ĪĪ |
Å─ÖC |
||
|
P0.22=10000 |
├┐▐D├}ø_ |
ĪĪ |
P0.22=10000 |
├┐▐D├}ø_ |
|
P0.24=1 |
Ę┤Ž“╚ĪĘ┤ |
ĪĪ |
P0.24=1 |
Ę┤Ž“╚ĪĘ┤ |
|
P1.01=600 |
æT┴┐▒╚ |
ĪĪ |
P1.01=600 |
æT┴┐▒╚ |
|
P3.00=0X108 |
╗ž┴Ńåóäė |
ĪĪ |
P3.00=0X108 |
╗ž┴Ńåóäė |
|
P3.01=0X02E |
ų„ÖCįŁ³cķ_ĻP |
ĪĪ |
ĪĪ |
ĪĪ |
|
P3.02=0X02F |
Å─ÖCįŁ³cķ_ĻP |
ĪĪ |
P3.02=0X02D |
²łķTĮŌ│² |
|
P3.05=103 |
╩╣─▄ |
ĪĪ |
P3.05=103 |
╩╣─▄ |
|
P3.10=0X00F |
╗žįŁ³c═Ļ│╔ |
ĪĪ |
ĪĪ |
ĪĪ |
|
P3.11=103 |
ł¾Š»śOąį╚ĪĘ┤ |
ĪĪ |
P3.11=103 |
ł¾Š»śOąį╚ĪĘ┤ |
|
P3.14=0X01E |
²łķTĮŌ│² |
ĪĪ |
ĪĪ |
ĪĪ |
|
P4.64=1000 |
╗ņ║ŽŲ½▓Ņ▀^┤¾įOČ© |
ĪĪ |
P4.64=1000 |
╗ņ║ŽŲ½▓Ņ▀^┤¾įOČ© |
|
P6.30=1 |
²łķT═¼▓Į╣”─▄ķ_ĻP |
ĪĪ |
P6.30=1 |
²łķT═¼▓Į╣”─▄ķ_ĻP |
|
P6.33=48 |
═¼▓Į╬╗ų├┐žųŲį÷ęµ |
ĪĪ |
P6.33=48 |
═¼▓Į╬╗ų├┐žųŲį÷ęµ |
|
P6.37=1 |
²łķT═¼▓Įų„Å─ÖC▀xō± |
ĪĪ |
P6.37=0 |
²łķT═¼▓Įų„Å─ÖC▀xō± |
|
P6.38=1500 |
²łķT═¼▓Įī”╬╗║¾═╦ŠÓļx |
ĪĪ |
P6.38=1500 |
²łķT═¼▓Įī”╬╗║¾═╦ŠÓļx |
|
P6.41=1 |
²łķT═¼▓Įī”╬╗ĘĮŽ“ |
ĪĪ |
P6.41=1 |
²łķT═¼▓Įī”╬╗ĘĮŽ“ |
|
šłĖ─═ĻģóöĄ║¾öÓļŖ╔·ą¦ |
||||
6:²łķT═¼▓ĮĘĮ░Ė┐éĮYŻ║
-
DA200ā╚ų├²łķT═¼▓Į╣”─▄Ż¼║å╗»╔Ž╬╗┐žųŲŲ„Ż¼ĮĄĄ═┐žųŲ│╔▒ŠŻ╗
-
═¼▓ĮŠ½Č╚Ė▀Ż¼ųžÅ═Č©╬╗Š½Č╚1mmŻ╗
-
▀\ąą░▓╚½┐╔┐┐Ż¼«öų„Å─╦┼Ę■╚╬ęŌę╗┼_│÷¼Fł¾Š»ĀŅæBŻ¼²łķT╝▄±R╔Ž═Żų╣Ż╗
-
═¼▓Įš{įć▒ŃĮ▌ĪŻ