|
ZMC408CEӲ����B
ZMC408CE�����\���Ƴ���һ����S������ EtherCAT �����\�ӿ�����������EtherCAT��EtherNET��RS232��CAN��U�P��ͨӍ�ӿڣ�ZMCϵ���\�ӿ������ɑ����ڸ��N��ҪÓ�C���C�\�еĈ��ϡ�

ZMC408CE֧��8�S�\�ӿ��ƣ����ɔUչ��32�S��֧�� ֱ�����a ������A�����a�����g�A�����������a�����݆������X݆��ͬ�����S�ȹ��ܡ�
ZMC408CE֧��PLC��Basic��HMI�M�B���N���̷�ʽ��PC ��λ�C API����֧��C#��C++��LabVIEW��Matlab��Qt��Linux��VB.Net��Python�Ƚӿڡ�

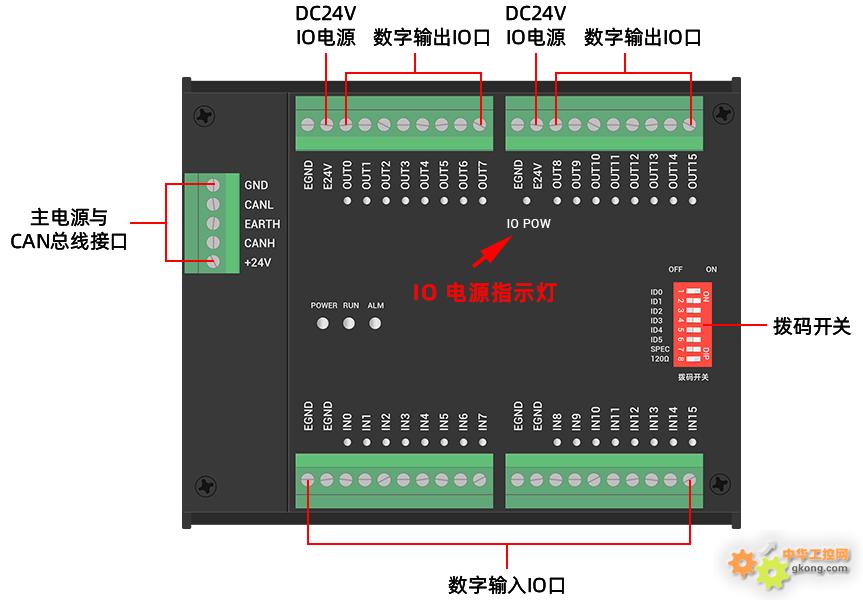
ZMC408CE֧��8�S�\�ӿ��ƣ��ɲ����}�_�S�������a����������EtherCAT�����S��ͨ��IO����24·ݔ��ں�16·ݔ���ڣ�����IO�����IO��ģ�M��AD/DA����·��EtherCAT���125us��ˢ�����ڡ�
ZMC408CE֧��8��ͨ����Ӳ�����^ݔ����Ӳ�����r�����\���о���ݔ����߀֧��8ͨ��PWMݔ����������ݔ���ڞ�OUT0-7��֧��8��ͨ��ͬ�r�|�lӲ�����^ݔ����
һ��ZCAN�Uչģ�K
ZCAN�����Uչģ�K�����ɂ�ϵ�У� ZCAN�Uչģ�K��ZMIO310-CAN�Uչģ�K�������҂���Ҫ����Bһ��ZCAN�Uչģ�K��
ZCAN�Uչģ�K�N��S�������w��������̖��

����ZCAN�Uչģ�K�ĽӾ�

1�� CAN���� ���B���˶���CANͨӍģ�K�r����ȫ��CAN��CANL��CANH�˿ڷքe�ӵ�һ�� CANL��CANL��CANH��CANH����
2����CAN������ɶ˽ӿڸ�����һ��120�W�� �K����� ��ƥ���·�迹�����CͨӍ�����ԡ��� ������/���ƿ��@һ����Ҫ��CANL��CANH֮�g����һ��120�W��裬߀�����һ��CAN�Uչģ�K�ēܴa�_�P������һ��120�Wķ����� ����
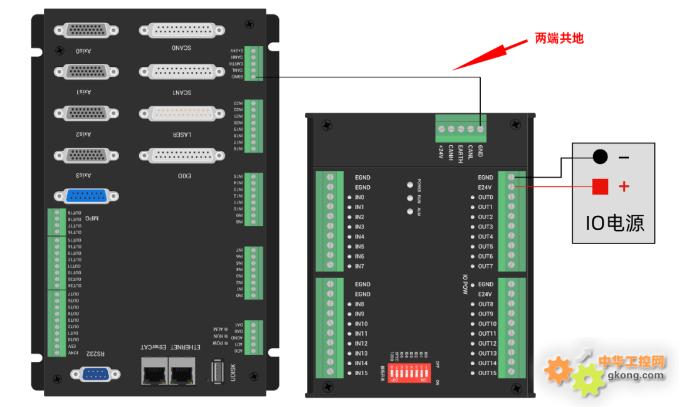
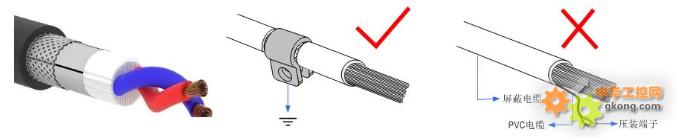
3��Ҫ���C�����������Դ�Ĺ����˺�CAN�Uչģ�K�����Դ�Ĺ����˽ӵ�һ��ˣ� �Q“����”�����Է�ֹCANоƬ���ġ�
4���ɔ_���صĈ��ϣ� �����Ӿ��؆���ZCAN�Uչ���ALM��һֱ��������Ҫ��ͨӍ����Q���p�g���ξ������Όӿɿ��ӵء�
5��ZIOϵ�ДUչģ�K�������p�Դ��늣��Uչ������Դ��IO���Դʹ�Ãɂ��Դ�քe��늣��@�ӿ��Է�ֹIO�ĸɔ_���oZCAN�Uչģ�K�����ԴӰ�ͨӍ�� ZAIOģ�M���Uչģ�K���Æ��Դ��늣�ֻ��Ҫ���Դ��IO����Ҫ�Ϊ���늡�
6������߀Ҫע�⏊늺���늲���Ҫ���_���x�����h20cm���ϡ�
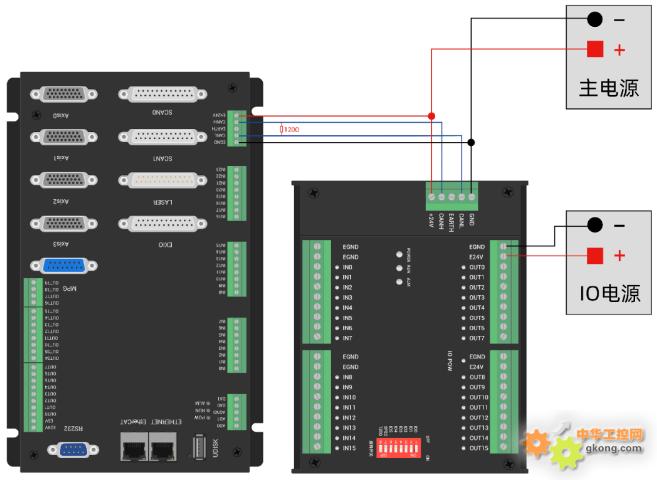
���Դ�������͔Uչģ�K�Ӿ�����
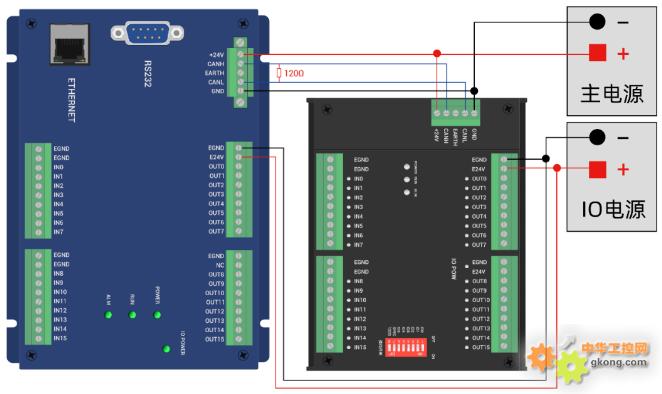
�p�Դ�������͔Uչģ�K�Ӿ�����
����ZCAN�Uչģ�K�ēܴa�O��

�f��ZCAN�Uչģ�K�ēܴa�O�ã��҂��ȁ��˽�һ�ܴa�_�P��ÿ�KZCAN�Uչ�嶼��һ���tɫ�ēܴa�_�P���ܴa�_�P���w���x���¡�
1���ܴa1-4
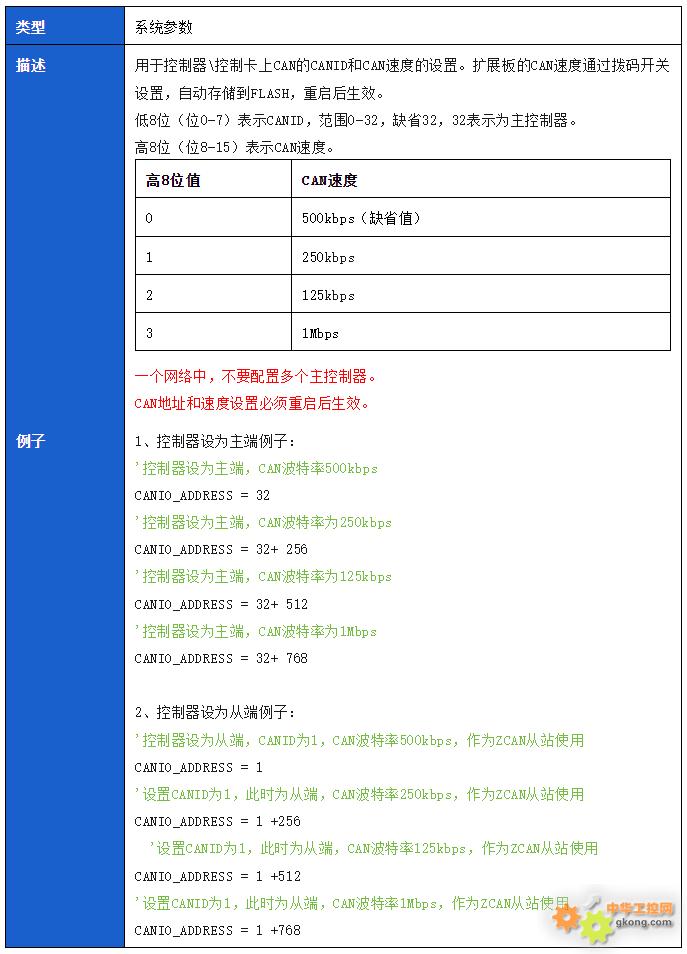
4λCAN ID��CAN�ܴa��ַ������ZCAN�Uչģ�KIO��ַӳ�䣬4λ���M��λ�M��ֵ����ֵ����0-15������������CAN�ܴa��ַ���O�������Uչģ�K��IO��ʼ��ַ��AD�cDA����ʼ��ַ��
��ͬ���M��λ�M��ֵ����������IO��ʼ��̖������r���±���
ע�� ��������ϵ�y��IO��̖�����؏ͣ�ӳ���YԴ�r����_���о�̖��

��ͬ���M��λ�M��ֵ����AD�cDA����ʼ��ַ������r���±���1-4λ�ܴa��B�c������ַID�Ʌ����ϱ���

2���ܴa5-6
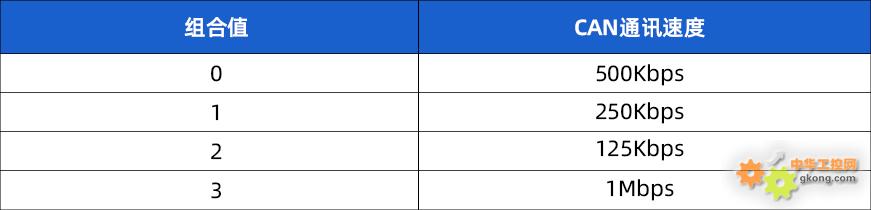
CANͨӍ�ٶȣ��M��ֵ����ֵ����0-3�����x�ķN��ͬ���ٶȣ�һ��CANͨӍ�ٶ�Ĭ�J���ɣ��ɔ_���ؿ��Խ���CAN��ͨӍ�ٶȣ�ͬ�r��Ҫͨ�^��������ͨ�^CANIO_ADDRESSָ����Ŀ������ˣ����ˣ���CANͨӍ�ٶ��cZCAN�Uչģ�Kһ�²ſ�������ͨӍ��
3���ܴa7
������A�� ��ZIO3232MT��7λ�Ǔܴaǰ6λ��ʹ�ܣ�ON�rǰ6λ�ܴa�O����Ч��OFF�r�O�ò���Ч����

4���ܴa8
120�W��裬��ON��ʾCANL��CANH�g������һ��120�W��裬�B���˶���CANͨӍģ�K�rֻ��Ҫ�����һ��CANͨӍģ�K�ĵ�8λ�ܞ�ON���ɡ�
��1��CAN�ܴa��ַ���O�ã�Ҫ����������ϵ�y��IO ��̖�����؏ͣ��������˱���IO��ַ�ķ�������ͨ�^RTSysܛ���c������������-����������B��-��Zcan���c���鿴���P��Ϣ��

�ψD��ZMC432�������ı��ؔ�����IO�cģ�M��IO�ķֲ���r��ᘌ��Uչ������IO��ZCAN�Uչģ�K���҂���ҪҪ��ZCAN�Uչ���IO��ʼ��ַҪ����ݔ��ھ�̖�����ֵ29��ͬ�r����ݔ���ھ�̖�����ֵ17���锵����IO�M��ֵ���ձ���CAN��ַ�ܴa�ĽM��ֵҪ���ڵ���1��
��2��CANͨӍ�ٶȡ�һ��Ĭ�J���ɣ����ܵ�OFF���˕rĬ�J�IJ����ʞ�500kbps��
��3��������A����һ��ܵ�OFF (ZIO3232MT��7λҪ�ܵ�ON)��
��4�����һ��CAN�Uչģ�K��8λҪ�ܵ�ON����ĩ�˵�120�Wƥ��������CAN�W�j��
���CAN�Uչģ�K�ĽӾ��͓ܴa�_�P���O�ú���Ҫ�ѿ������͔Uչģ�K ����؆� ����Ч��
�ġ�ZCAN�Uչģ�K������C
1�� ����؆����^��ZCAN�Uչģ�K��ALM�Ƿ�Ϩ�磬�Uչģ�K��������˿���������ͨӍ�ϵ�Ԓ��ZCAN�Uչģ�K�ğ���ԓ��Power[��]��Run[��]��Alarm/ALM[��] �� �DALM������ʾ��������
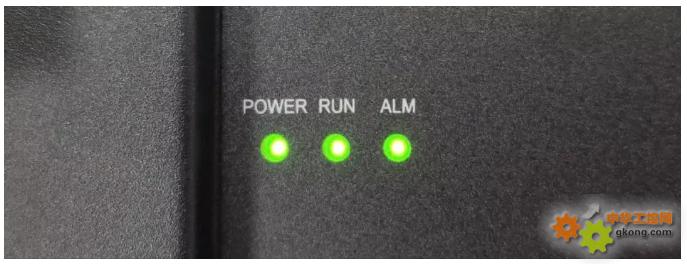
IO���Դ�Ƿ������� ���DIO POW������ʾIO�����������

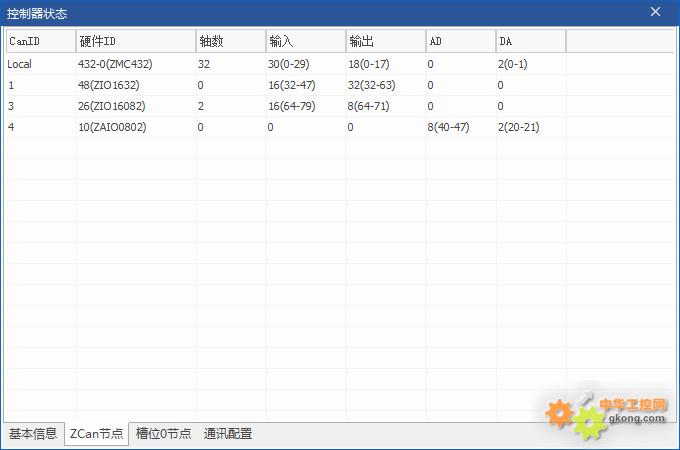
2�� ͨ�^RTSysܛ���c������������-����������B��-��Zcan���c���ɲ鿴������ZCAN�Uչģ�K��IO��ʼ��̖����Ϣ��
3��ZCAN�Uչ��IO�ڱO�ء�RTSys ܛ���c�������ߡ�-��ݔ���/ݔ���ڡ�-��IO�x�����ɱO�،���IO�ڵ�IO��Ϣ��

4��ZCAN�Uչ��ģ�M���O�ء� RTSysܛ���c�������ߡ�-��AD/DA�������ɱO�،�����ģ�M��ݔ��ݔ���ڵ����P��Ϣ��ZAIO0802�Uչģ�K��ģ�M��ݔ���cݔ������12λ�ģ����� ���̶�ֵ�nλҪ�ք��x��4095��

5��ZCAN�Uչ�S�Ĝyԇ�� CAN�����Uչ��ʽ�Uչ�}�_�S�r�����xZIO16082���Uչ�ɂ��}�_�S�� �Uչ�S��Ҫ�M���Sӳ��IJ���������AXIS_ADDRESSָ��ӳ�䣬ӳ��Ҏ�t���¡�

ID��Uչ��1-4λ��ַ�ܴa�ĽM��ֵ��ӳ����ɺ��O��ATYPE���S������Ϳ���ʹ�ÔUչ�S��

�����������̌�ZCAN�Uչ�S�S̖�M��ӳ�����c�������ߡ�-���ք��\�ӡ��F�ڌ������S̖���M�������c�ӵĜyԇ�����늙C�\�ӱ��^������������������10�ı������������}�_������ֵ���yԇ��Ч����

�塢ZCAN�Uչģ�K��Ҋ���}����
��Ҋ���}1�� CAN�Uչģ�K��Power[��]��Run[��]��Alarm[��]�Ϳ�����ͨӍ���ϣ�RTSysܛ���ڡ���������-����������B��-��Zcan���c������Ҳ�������Uչģ�K����Ϣ��
��Q���h���£�
A�������ڶ����ĽӾ����ݣ��Ų�Ӿ����Դ�Ƿ�������ZIOģ�K�����Դ�Ƿ�24V��IO���ӵ��Դ�Ƿ�24V����ͨ�^�f�ñ��Ų錧���Ƿ�Ӿ����ã��Ƿ��н��|��������r��CANͨӍ���|�Ƿ�ʹ���p�g���ξ������Όӿɿ��ӵأ��Uչ���Ƿ���ʹ���p�Դ��늡�
B�� ���������Ƿ��120�W��裬�����һ���Uչģ�K�ܴa�_�P8�Ƿ�ܵ�ON��
�ɶ˵�CAN�ĵ�Ҫ��ͬһ���أ�Ҫ���C�����������Դ�Ĺ����˺�ZCAN�Uչģ�KZIOģ�K�����Դ��GND�ӵ�һ��ˣ��Q“����”����ͬһ“��”늄��Է�ֹCANоƬ���ġ�
C�� ��Щ�Uչģ�K������ZIO3232MT����Ҫ�ѓܴa�_�P7����ȥ��ʹ�ܣ����ѓܴa�_�P7�ܵ�ON��Ȼ�����؆��鿴��
D�� �ܴa�_�P�Ƿ��O�����_���]�кͱ��w�������Uչģ�K��IO��ַ�ě_ͻ��
����ͨ�^RTSysܛ���c������������-����������B��-��Zcan���c���ɲ鿴������ZCAN�Uչģ�K��IO��ʼ��̖����Ϣ��
E�� �Ƿ���ڸɔ_Դ���ѿ������͔Uչģ�K������IO���Ӽ��S�ӿڵ������Ӿ������Ŷ������������o�P���O���Ȕ�늣�Ȼ�����؆������Ƿ����ͨӍ�ϡ�
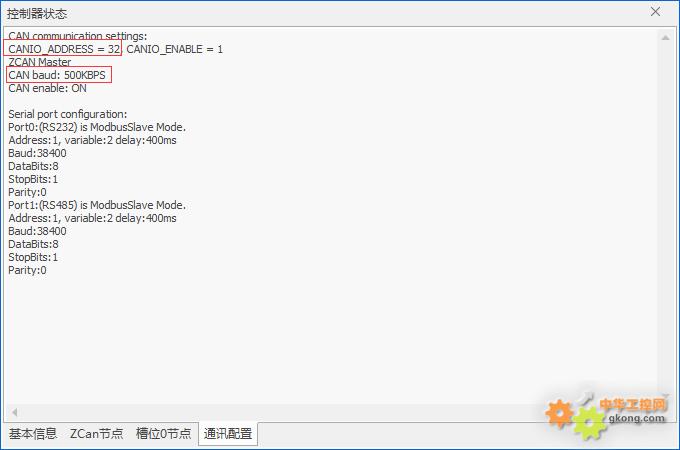
F�� ��������CAN�Ƿ�������ģʽ(CANIO_ADDRESS��bit5�б���1�����磺CANIO_ADDRESS=32 )��CANͨӍ�IJ����ʺ͔Uչģ�K�Ƿ�һ�¡�����ͨ�^RTSysܛ���c������������-����������B��-��ͨӍ���á��ɲ鿴������CAN��վ�O�õ�Ԕ����Ϣ��
G���鿴Ӳ���Ƿ��ģ�����Q���������Uչģ�K�yԇ�鿴��
��Ҋ���}2�� �Uչģ�K��һЩIO푑���������һЩIO푑�������
��Q���h�� ͨ�^RTSysܛ���c������������-����������B��-��Zcan���c���ɲ鿴������ZCAN�Uչģ�K��IO��̖�����Ƿ��Л_ͻ��

����ZCAN�Uչģ�K���Pָ���f��
1�� CANIO_ADDRESS -- CAN ͨӍ�O��
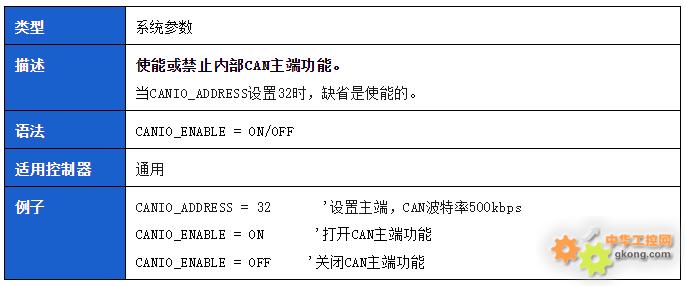
2��CANIO_ENABLE -- CANʹ��
3�� CANIO_ STATUS -- CAN �Uչ�� ͨӍ ��B ��ԃ

���Σ����\�Ӽ��g�\�ӿ�����/�\�ӿ��ƿ�����ZCAN����ZIOģ�K��ʹ�� ���ͷ������@�
���ྫ�ʃ���Ո�Pע“ ���\��С���� ”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���aƷ���аl���LJ��Ҽ����¼��g��I�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă����˲ţ��ڈԳ��������µ�ͬ�r���e�O�ϸ����У�fͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��lչ������I֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I����Ҫ�I���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵ�

|

