|
���������\�Ӽ��g�߂䌣����݆�ӿڵ��\�ӿ�����ZMC408CE��������B��݆����݆�����ü�ԭ������������݆�ӿڽӾ��Լ���݆�������á�
�Ϲ�(ji��)�v����ʹ�����\��basic�Z���M����݆�������ã� ����(ji��)��Ҫ�v��C++�{(di��o)��API����(sh��)��ӿڌ��F(xi��n)��݆���á�
01 ��݆���ü�ԭ��
��݆Ҳ�Q�֓u�}�_�l(f��)��������Ҫ���ڔ�(sh��)�ؙC�������w�ӹ����ġ��Pʽ�ӹ����ġ����T�ӹ����ĵȔ�(sh��)���O�䡣����݆���D(zhu��n)�r�����a���a(ch��n)���c��݆�\������������̖��ͨ�^��(sh��)��ϵ�y(t��ng)�x�����˲��������M�ж�λ��
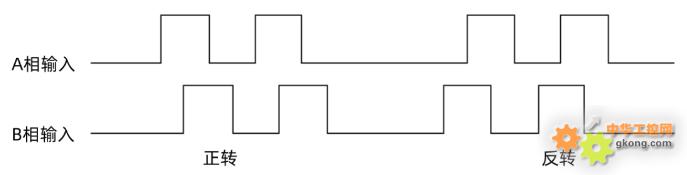
�ք��}�_�l(f��)�������������S�Ĺ�늴a�P�������Эh(hu��n)��ͨ�����Ŀ̾����u����݆���ɹ�늰l(f��)��ͽ��������xȡ���@��2�M���Ҳ���̖HA��HB��ÿ�����Ҳ����90����λ�����HA��HB����̖���90�ȣ���ͨ�^A����ǰ߀��B����ǰ���o�����D(zhu��n)�}�_���D(zhu��n)�}�_ȥ�����ŷ�늙C���D(zhu��n)���D(zhu��n)��
02 ��݆��B
1. ͨ�^��݆�ϵ�“�S�x�����o”�x����Ҫ�Ƅӵ������S��
2. ͨ�^“�����x�����o”�x����m���Ƅӱ���×1/×10/×100����
3. ���D(zhu��n)“��݆�u��”�Ƅ������S��형r����D(zhu��n)�������Ƅӣ���r����D(zhu��n)��ؓ���Ƅӣ����D(zhu��n)�ٶȿ������Կ��������S���\���ٶȣ�
4.���o“��ͣ”���o��ֹͣ��݆�\�ӣ�
5.��������݆�ӿڞ��p�Ř˜�DB15ĸ�^����Ҫ��݆���^���p�Ř˜�DB15���^��

03 ��������݆�ӿڽӾ�
1.Ӳ����B
��������ZMC408CE�\�ӿ��������߂䌣�õ���݆�ӿڡ�
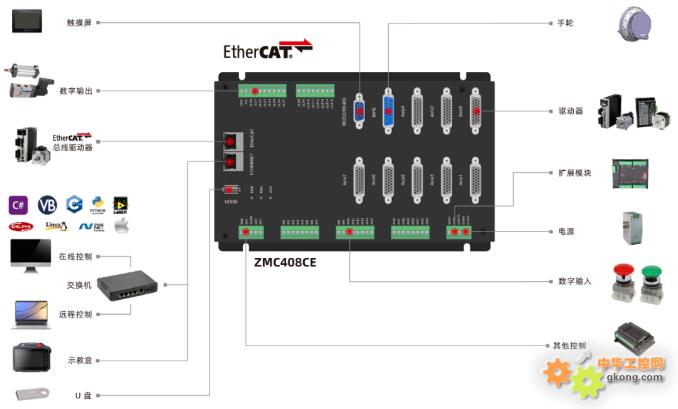
ZMC408CE�����\�Ӽ��g�Ƴ���һ�������EtherCAT�����\�ӿ����������ļ��g���������M��FPGA���g�����F(xi��n)Ӳ��λ�ñ��^ݔ��������ݔ�����ܣ����C�B�m(x��)܉�E�ӹ��ij�ɫ���ܺͷ�(w��n)���ԣ��Լ��ӑB(t��i)��(sh��)��(j��)���@�Č��r�ԣ��Ķ����F(xi��n)���Ӿ��ʿ��ƺ�������a(ch��n)Ч�ʺ�Ʒ�|(zh��)��
ZMC408CE֧��EtherCAT�����S + �}�_�S��ϲ��a����Ó�C��(li��n)�C�\�У��ɿ�늙C�S��(sh��)8�S��������̖�ṩ16��32�S���x��֧��ZDevelop + ��N����λ�C��Ͼ��̣����Ԍ��F(xi��n)�cλ�\�ӡ����݆��ֱ�����a���A�����a���B�m(x��)܉�E�ӹ���30+�N�C����ģ�͵Ŀ��ơ�
ZMC408CE�a(ch��n)Ʒ���c
1.������̎�����������\���ٶȡ�푑��r�g�͒������ڵȣ�
2.һ�S/���S/���S����ͨ��ҕ�X�w�ģ����ٸ߾���
3.λ��ͬ��ݔ��PSO���B�m(x��)܉�E�ӹ��Ќ������c�z�z�����ƺͼ����������Ƶȣ�
4.���Sͬ�����ƣ�������ϵ�������Ƶȣ�
5.EtherCATͬ�����ڿɿ���125us��
6.EtherCAT�������}�_�S��ϲ��a��
7.ֱ�����a��������g�A�����a���������a���ӗl���a�ȣ�
8.�����`���PC��λ�C�_�l(f��)��Ҳ��Ó�C�����\�� ��
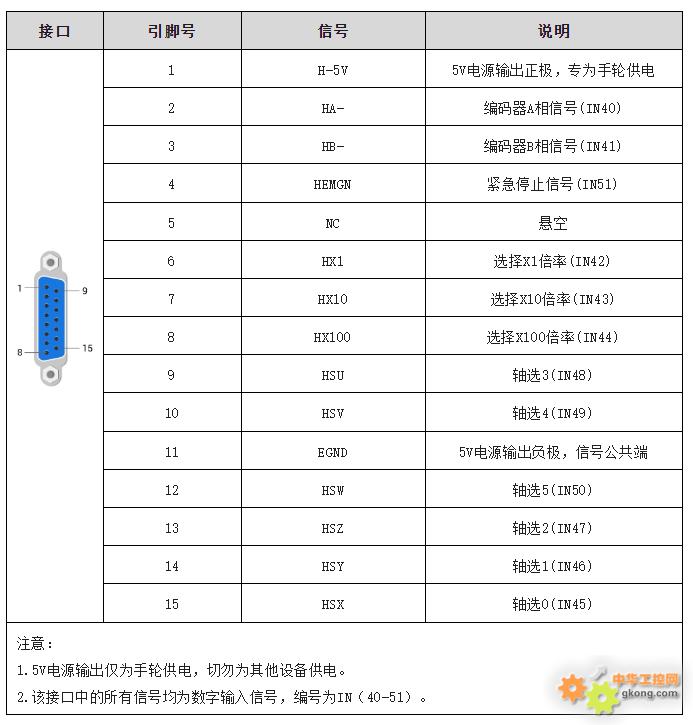
2.��������݆�ӿ�MPG���x
3.��݆�Ӿ�����
4.ע�����
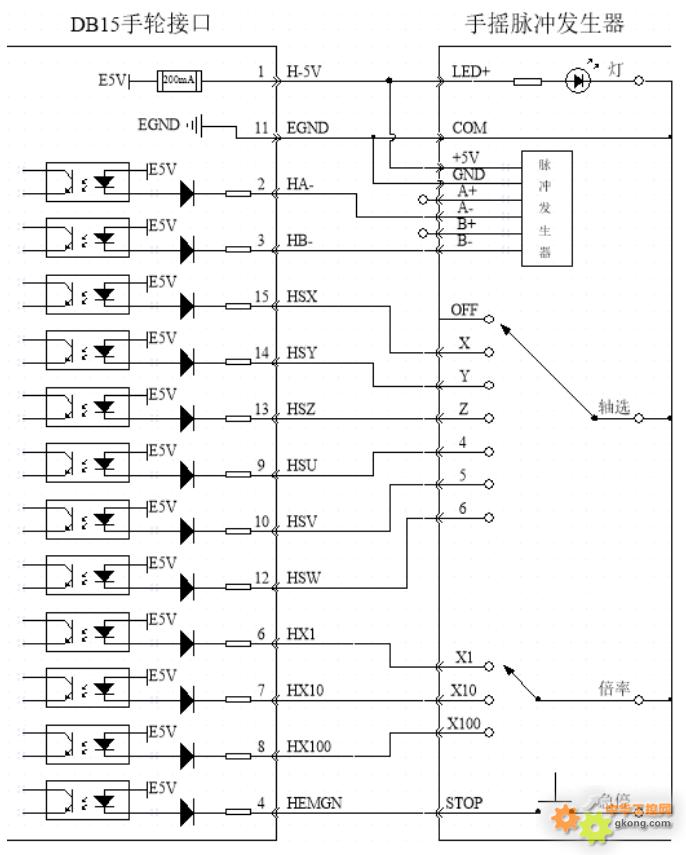
��݆���a���S�ӿڽӾ�ԭ�����ψD��ʾ����݆�S�ҵ��OӋ��N���ӣ�Ո�Ȳ鿴��݆��(n��i)�����OӋ�D���c�\�ӿ������_�J���_��֔���Ӿ���Ոʹ���p�g���ξ��������ǭh(hu��n)�����ӵĈ��ϣ��ձ�ʹ���Όӳ�ֽӵء�
04 ����(sh��)�ӿ�ָ���f��
ʹ��ZAux_Direct_Connect�������݆�B�ӵ��\���S��ָ���f�����±���

05 C++��������
1.���ò��E
��1���������� ��݆�Ӿ�ʾ��D���_�B����݆�Ϳ�������
��2����������ĩβ���S�a�����d���̣�ʹ��Visual Studio 2022�����_C++��݆�\�����̣��\��֮�����(j��)��̖�x��EtherNET�����ڡ�PCI��LOCAL����һ�N�ӿ��B�ӿ�������
��3�������S̖����ͬ��������̖����݆�S̖�����ʺ��S�x��IN��̖��һ�ӣ�Ԕ��Ո�����������Ñ��փԣ�������ʹ�ÿ�������̖��ZMC408CE����݆�ӿ��S̖��8��ԓ��������݆�ӿڟo����Ĭ�JAXIS�S̖������M��ӳ��ſ���ʹ�ã�ӳ����_�}�_�S̖���������nj���݆ӳ�䵽�S10��
��4������IO������(j��)��Ҫ�x���S�x��HSX��HSY��HSZ��HSU���ͱ��ʣ�HX1��HX10��HX100���Լ��o��ֹͣ ��HEMGN�����ܣ��@Щ��̖���|(zh��)�锵(sh��)��ݔ����̖���й̶��ľ�̖�����o�̶��Ĺ��ܣ���ҪZDevelop�_�l(f��)�������Q�����]���õĹ��ܣ��S�x����connectͬ���\�ӵı��B���S�����ʼ�connect���ʡ�
��5������������ü����_ʼʹ����݆��
2.�����\���
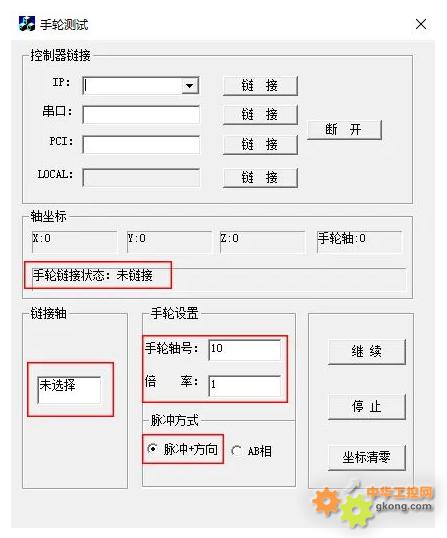
�����\�гɹ�����@ʾ���½��棬δ�B�ӿ�����֮ǰ���S���˺���݆�S����Ĭ�J��0����݆��B(t��i)��“δ�B��”����݆�S̖��10��朽ӱ��ʞ�1����݆�S�}�_��ʽ��“�}�_+����”��朽��S��“δ�x��”��
3.������朽�
�x��IP�����ڣ�朽ӵ�������ZMC408CE ��朽ӳɹ�����݆�yԇ�t��׃��“���B��”����ʧ���t���Џ���“朽�ʧ��”�c���_���P�]�������z��IP��ַ�ڵ�ַ����朽ӡ�
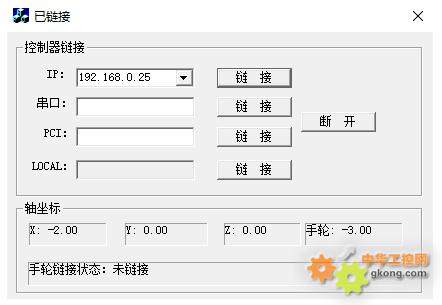
��朽ӳɹ���

��朽�ʧ����
4.��݆�S����
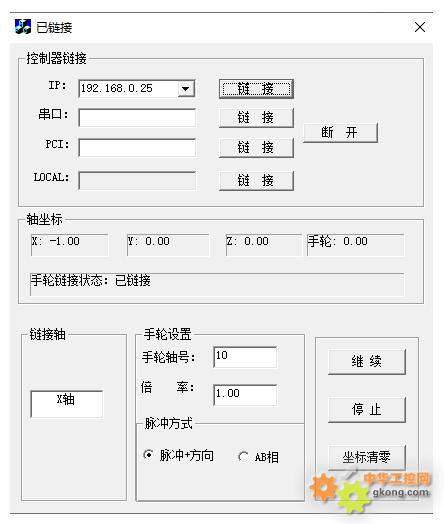
����朽��Ͽ������ɹ�֮���@ȡ�S���˺���݆�Sλ�á�ͨ�^��݆��“�S�x��”���D(zhu��n)���o�x��朽��S�����朽ӳɹ�����݆朽Ӡ�B(t��i)��׃��“��朽�”��朽��SҲ���@ʾ����朽ӵ��S̖��朽ӱ��ʡ�
�����Ҫ�ГQ�B���S��朽ӱ��ʣ�ֻ��Ҫ���D(zhu��n)��݆“�S�x��”���o��“�����x��”���o���ɡ��c��ֹͣ���o֮���ԄӔ��_朽ӣ��˕r��݆��“�S�x��”��“�����x��”���o̎�ڟoЧ��B(t��i)��ֻ���c���^�m(x��)��ŕ�����朽ӣ� ���h��朽��S֮ǰ���x��朽ӱ��ʣ���t���ܕ���ײ�C��Σ�U���c����������t����X��Y��Z����݆������ȫ�����㡣
5.��݆�S�S̖��
�����̵���݆�S�S̖�������S10�����Ҫ�M���ģ���������݆�O���е���݆�S̖��ֱ���M�и��ģ���݆�}�_��ʽҲ���ڴ�̎�M���ġ�
6.��݆�S̖ӳ��
��ͬ��������Ĭ�J��݆�S�ӿڲ�ͬ�����w��Ҫ�����������փԣ���ͬ�c�Dz���ʹ���Ă���̖�Ŀ���������Ҫ�����M���Sӳ�䌢��݆�Sӳ�䵽�����S̖ȥ��
�ڿ������փ����ҵ�Ĭ�J��݆�ӿ��S̖��ʹ��ZAux_Direct_SetAtype��handle����ӳ����S̖��0������ӳ����S����O�Þ�0��߀ԭ�S�O�ã�ZAux_Direct_SetAtype��handle��Ҫ�ĵı����}�_�S̖,0����Ҫ�ĵı����}�_�S̖�S���Ҳ�O�Þ�0���Ͱ汾���O�Õ����e��
ʹ�ñ����Sӳ��ָ��ZAux_Direct_SetAxisAddress{ handle����ӳ����S̖��(-1<<16) +Ҫ�ĵı����}�_�S̖ }��

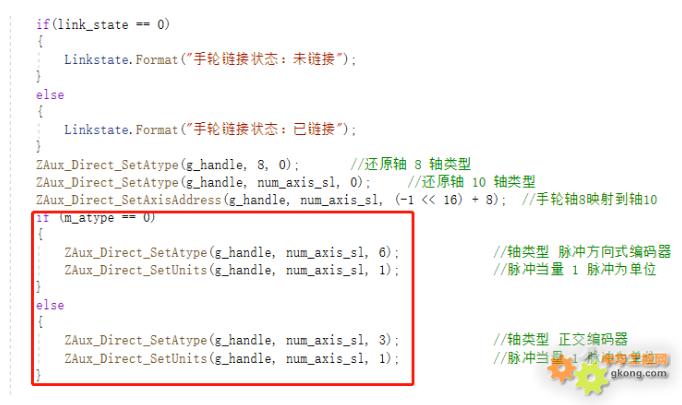
7. ��݆�S����(sh��)����
�S̖ӳ�䅢��(sh��)�������ʹ��ZAux_Direct_SetAtype ��handle����݆�S�S̖��3/6�� �M������݆�S����ͣ�ATYPE=3�������a����ATYPE=6�}�_����ʽ�ľ��a�����O�ú�֮������\���������M���ГQ��
ʹ��ZAux_Direct_SetUnits ��g_handle����݆�S̖���}�_������ ����(j��)���H��������݆�S���}�_������
8.������݆朽�
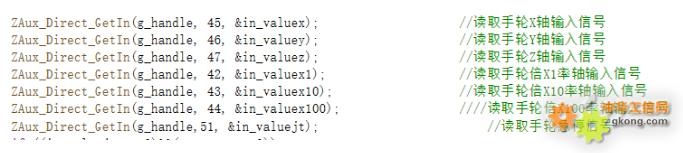
��ԃ�������փԣ��ҵ���݆�����Sݔ����̖��������̖����ͣ��̖��ʹ��ZAux_Direct_GetIn ��g_handle��ݔ��ھ�̖��&�@ȡݔ��ڵĠ�B(t��i)ֵ�� �M��IO��̖�xȡ���@���\���S��X��Y��Z������������0��1��2�S��
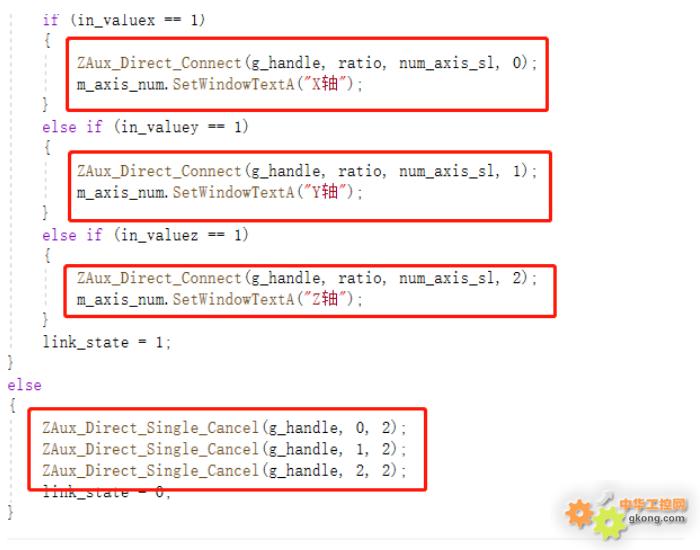
ͨ�^IO��̖���Д�ʹ��ͬ���\��ָ��ZAux_Direct_Connect ��g_handle��朽ӱ��ʣ���݆�S���\���S�� ���M���S��朽ӡ�������ʹ�Æ��S�\��ָֹͣ��ZAux_Direct_Single_Cancel ��g_handle���\���S��ֹͣģʽ�� �����_�S朽ӡ�
9.��݆�Sλ�ë@ȡ������
����朽�֮����Ҫʹ��ZAux_Direct_GetMpos ��g_handle����݆�S̖��&showpos[��݆�S̖]�� ���@ȡ����݆�S�Į�ǰλ�ã����@ʾ�ڽ����ϡ�

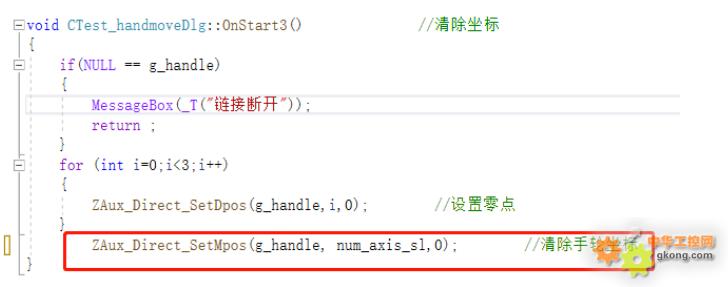
ʹ��ZAux_Direct_SetMpos ��g_handle����݆�S̖��0�� �M����݆�������㡣

���Σ����\�Ӽ��g EtherCAT�\�ӿ������ڔ�(sh��)�ؼӹ���݆�S���еđ���֮C++�� �ͷ������@�� ��
���ྫ�ʃ�(n��i)��Ո�Pע“ ���\��С���� ”����̖����Ҫ���P�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D(zhu��n)�dՈע������Դ��
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g��I(y��)�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A���g���о����LJ���(n��i)�����I��l(f��)չ������I(y��)֮һ��Ҳ�LJ���(n��i)���С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I(y��)����Ҫ�I(y��)���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵȡ�
|

