|
���죬���\�Ӽ��g��С��邃��ͨ�^ҕ�l���D�ĽY�ϵ���ʽ���o��ҷ���һ�£����\�Ӽ��gXPLC516E ���_��ʽLinux ƽ�_ʹ�ã��ϣ�——�_��ʽLinuxƽ�_������XPLC516E����Linux�µ�Qt�_�l�����ݸ�؛�M�M��Ո�Ԏ���ʣ��ʂ� �v�ɡ�
���\�Ӽ��g��XPLC516E���������ҪǶ��Linux ϵ�y�����ă�������Щ��
Մ�����\�ӿ�������Linuxϵ�y�ă��ݣ�Linuxϵ�y�����ă�����һ��Ҫ���ռ�һ�¡�
��1��Linuxϵ�y�ɞ�Ŀǰ�����Pע��ϵ�y֮һ����Ҫ���������һ����ȫ���M�_Դ������POSIX��Unix�Ķ��Ñ������΄ա�֧�ֶྀ�̺Ͷ�CPU�IJ���ϵ�y��
��2��Linuxϵ���^����Unix�����ԣ����зdz�����ľW�j���ܣ���������������β����Ϳ������ó����m���_�l�h�������Ժ����_�l�^�̣�ʹϵ�y�����^������ֲ�ԡ�
���\�Ӽ��g��XPLC516E����һ����d�_��ʽLinuxϵ�y�Ŀ�������֧���Ñ���������Linuxƽ�_�µđ���ܛ�������㰲�bQtܛ���ȣ�֧��Qt�_�l�˙C�����Ñ����棬֧�փ��Pֱ��ͨ�^ϵ�y���ς����d�ļ��� ��C��U�P���x���ձ�Ҫͨ�^�����a���F��Ƕ��ϵ�y��ʹ����X��U�Pһ�ӣ���
���\�Ӽ��g��Linuxϵ�y�ă��ݺ�XPLC516E�����������\�ӿ��Ƶă��ݣ��_16�S�\�ӿ��ƣ�֧��ֱ�����a������A�����a�����g�A�����������a�����݆������X݆��ͬ�����S��̓�M�S�O�õȣ����Ã����ľW�jͨӍ�f�h���Ԍ��F���r���\�ӿ��ƣ����ܺõĽY�ϡ�
ͬ�rXPLC516E�߂�������CӲ���ӿڣ�֧�ֵ�����ҕ�X���V��������3C��ӡ�����ӹ���ӡˢ���b���Ԅӻ���ˮ������Ӱ댧�w���������b���C���ˡ��طN�C���O�䡢���_�ʘ����t����е���I��
�����ۺÌW����С��邃����Ч�ČW�������\�Ӽ��g��С��邃���H�ʂ���Ԕ���ĈD���v�⣬߀���ˌ��õĽ̌Wҕ�l��
��ҕ�l���^�a����Ҫ�o��
Ո���¿��D��Ԕ�⣡
һ��Ӳ������
�� XPLC516E������1�_
�� 24Vֱ���Դ1��
�� �W��1�l
�� ��HDMI�ӿڵ��@ʾ��1��
�� HDMI�B�Ӿ�1�l
�� ���1��
�� �I�P1��
�����_�lܛ���cƽ�_
a.�_�lܛ��

b.�_�lƽ�_

������Linux����
XPLC516E������֧��Linuxϵ�y�������ṩ��Qtܛ����5.5.1�汾����֧��Ƕ��ʽQt�_�l�����\�Ӽ��g֧�ֹ������Rȫ��Qt�ӑB朽ӎ��Լ����к������x���\�ӿ��Ǝ캯���փ��f�������a��ֲ�ԏ����dz������\�ӿ����_�l���֣��ܘO��s���_�l�ˆT�_�l�����b��ĕr�g���ڡ�
������νӾ�?
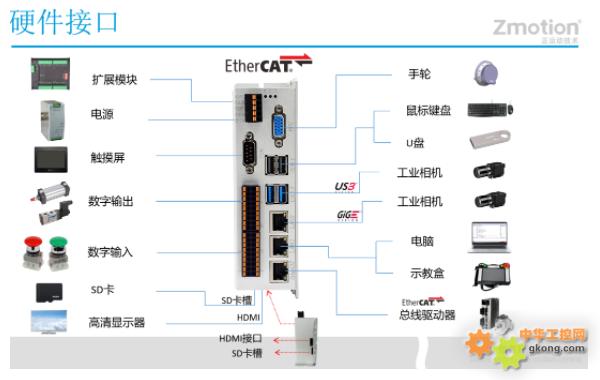
������Ӳ���ӿ�
����������Ӳ���ӿڈD�M�нӾ����B������I�P��HDMI�ӿڵ��@ʾ���������bQtܛ�����M���Ŀ�_�l��
�ġ����ʹ��Qtܛ���M���Ŀ�_�l��
֧��Windows Qt�_�l��Linux Qt�_�l��
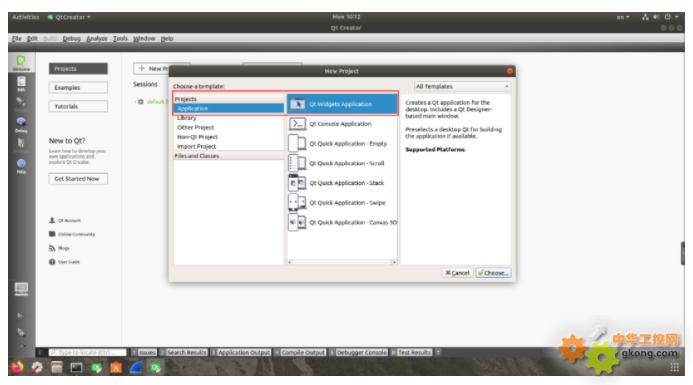
1��ʹ��Qtܛ���½�Qt�Ŀ��
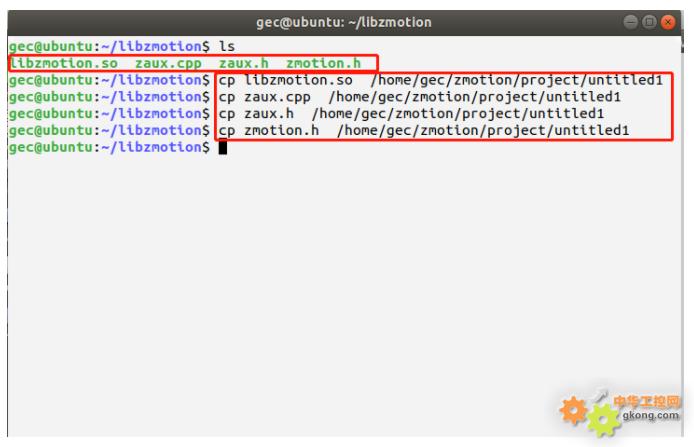
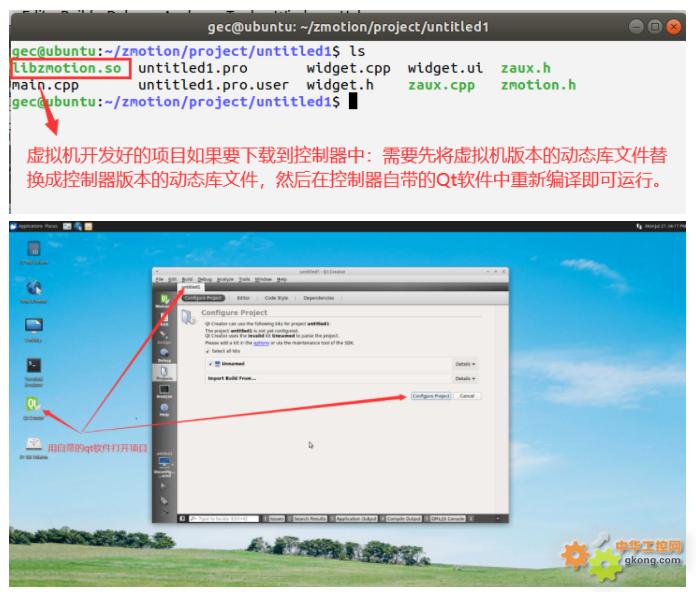
2�����ӑB���Լ����P�ļ���libzmotion.so��zaux.cpp��zaux.h��zmotion.h�������Ƶ��½��õ�Qt�Ŀ���档
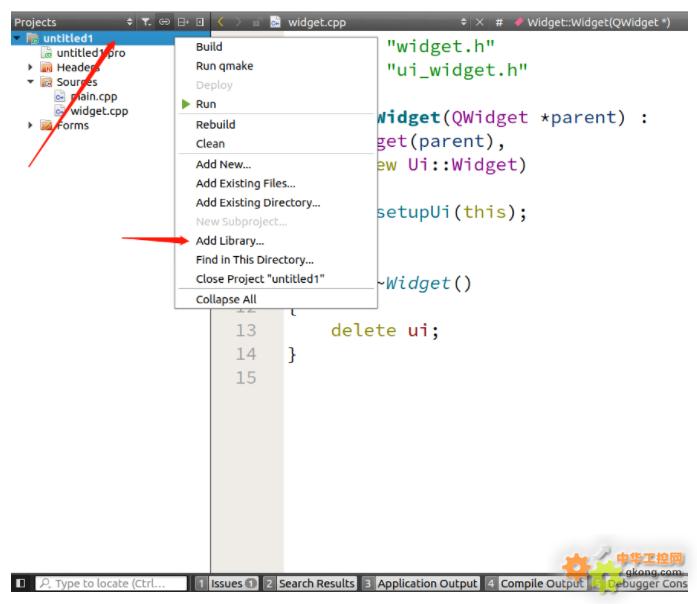
3����Qt�Ŀ�������ӄӑB�죨libzmotion.so����
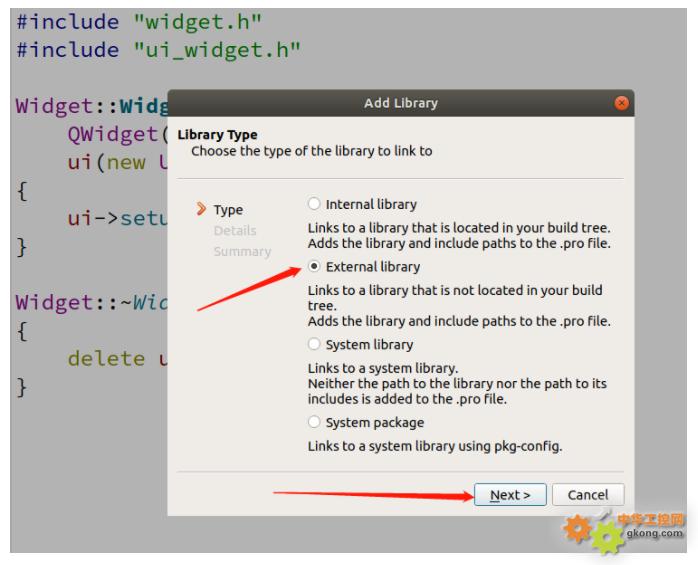
a.���I�Ŀ���c�����ӎ졣
b.�x��ڶ����ⲿ�죬�c��next��
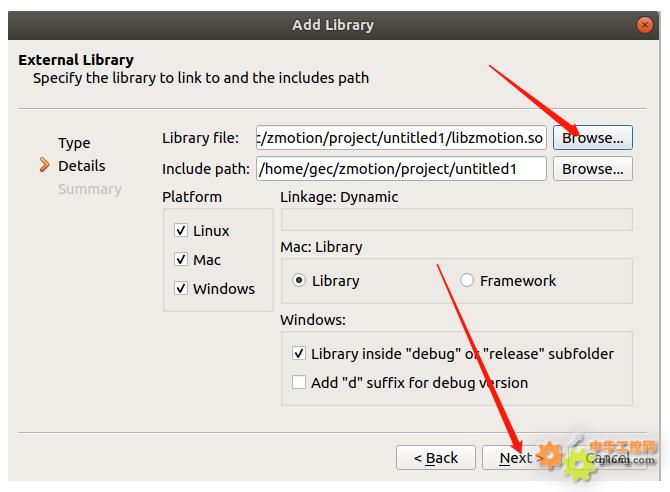
c.�c���g�[���ļ����x�������Mȥ�ĄӑB�죬�c��next��
d.�c��finish������ɄӑB�����ӡ�
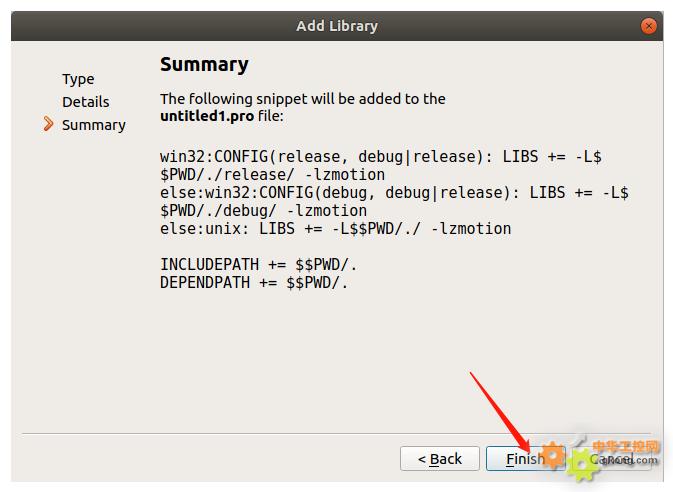
ע����헣�ע��ӑB������ֱ����lib�_�^�����R�e��
4����Qt�Ŀ���������^�ļ���zmotion.h��zaux.h����
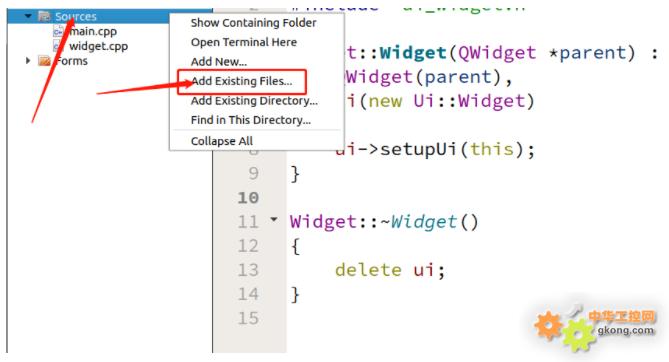
a.�������IHeaders���c��Add Existing Files...
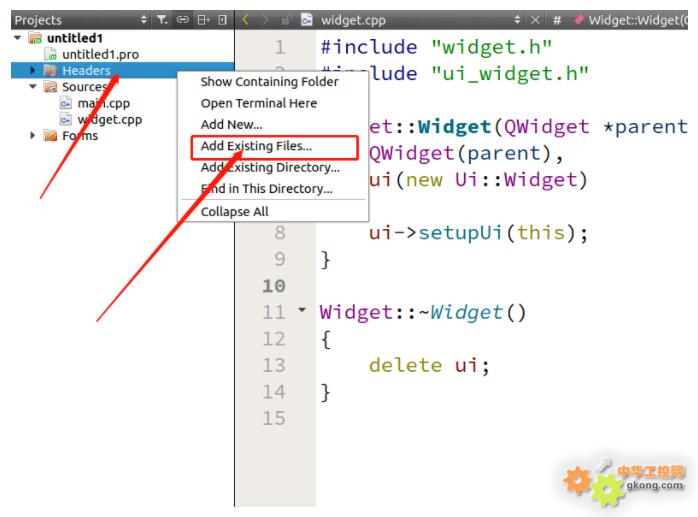
b.�ҵ��������Ʒ��M�Ŀ��zmotion.h�ļ����p��zmotion.h�����������^�ļ�zmotion.h�����Ŀ�С�
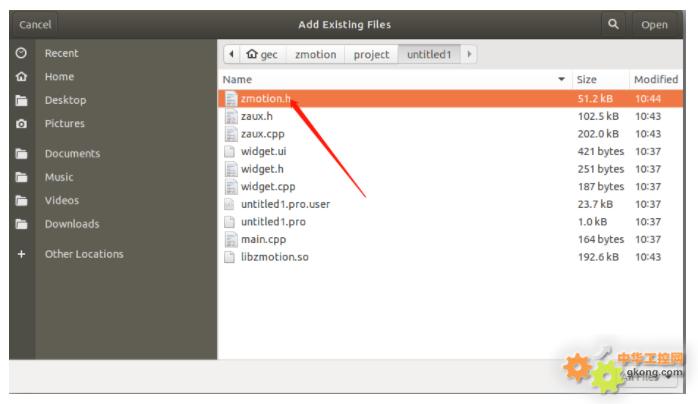
c.�؏�����ɂ����E����zaux.h�ļ�Ҳ���ӵ��Ŀ�С�
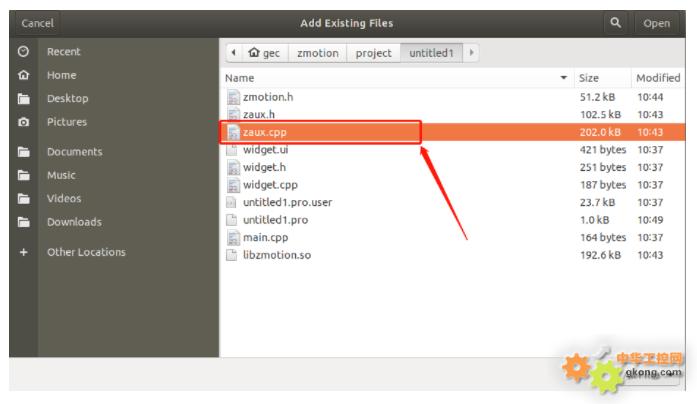
5����Qt�Ŀ��������cppԴ�ļ���zaux.cpp����
a.�������ISources���c��Add Existing Files...
b.�ҵ��������Ʒ��M�Ŀ��zaux.cpp�ļ����p��zaux.cpp�ļ�����������Դ�ļ�zaux.cpp���Ŀ�С�
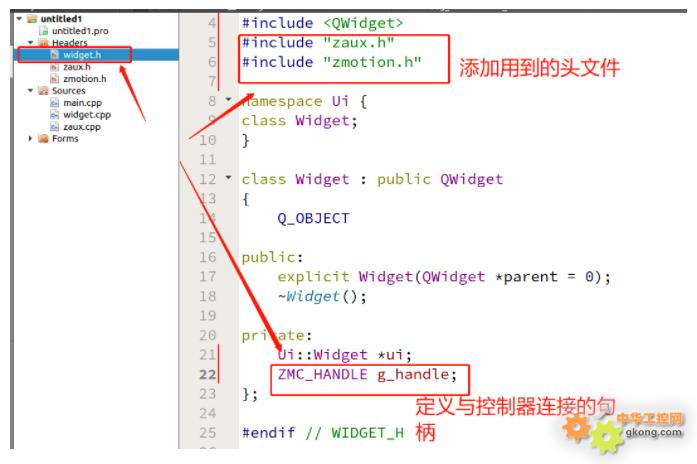
6����widget.h�����ӣ� #include “zmotion.h”�� #include “zaux.h”���Ͷ��x���������B�Ӿ����
7��ʹ�ð��o�IJۺ���������̫�W�B�ӿ�������
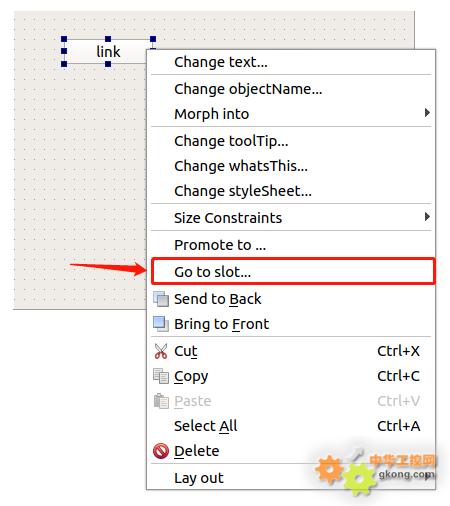
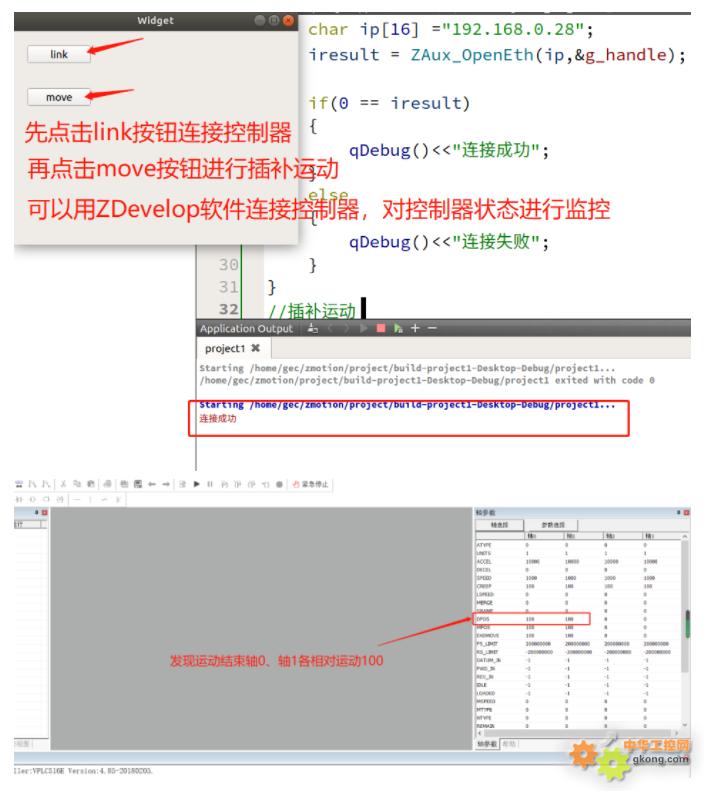
a.���ȣ���Qt��ui�OӋ����������һ�����o��������link���ғ�link���o�c��Go to slot...���D��ԓ���o�IJۺ�����
b.Ȼ����ZMotion PC �����փԣ��˽�����̫�W�B�ӿ������ӿں������÷���
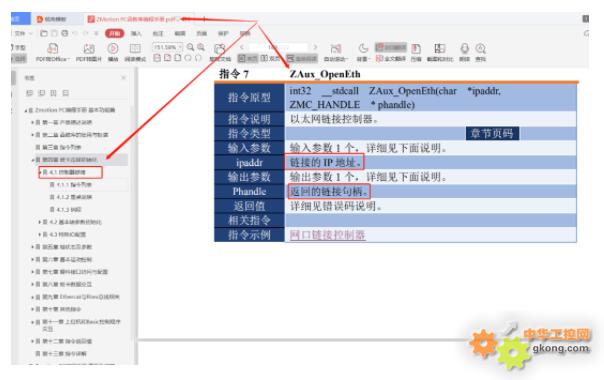
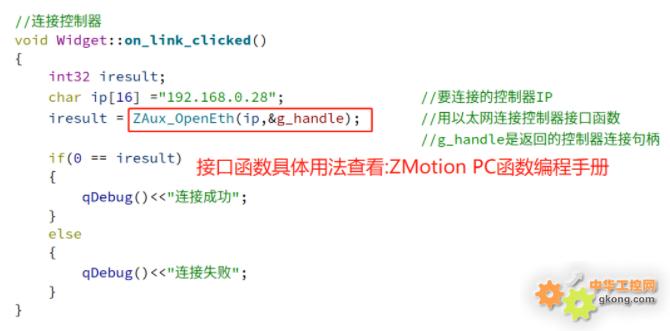
c.��������PC�����փ���ZAux_OpenEth�������÷��ڲۺ����о������a���M�й��܌��F��
8�����������F���a�\�ӣ����a���F�^�̡�
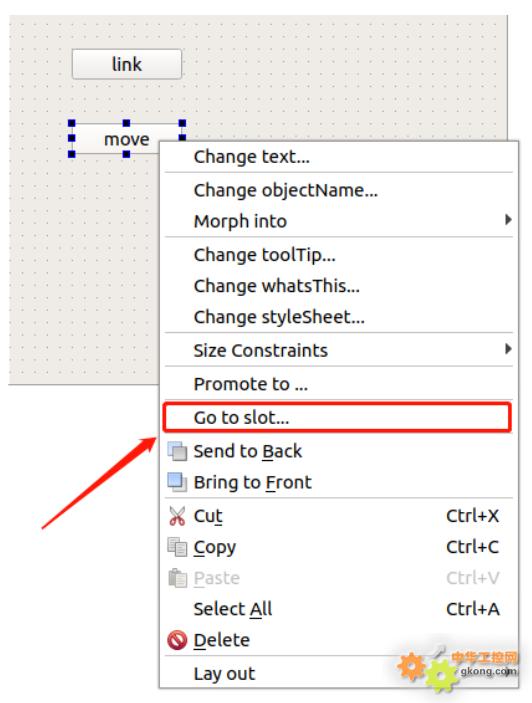
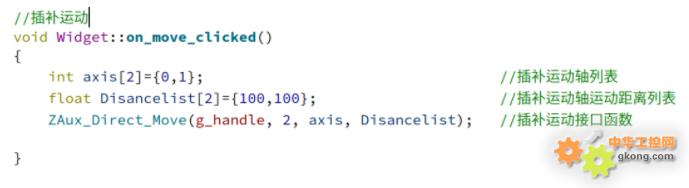
a.���ȣ���Qt��ui�OӋ����������һ�����o��������move���ғ�move���o�c��Go to slot...���D��ԓ���o�IJۺ�����
b.Ȼ����ZMotion PC �����փԣ��˽���S���a�\�ӽӿں������÷���
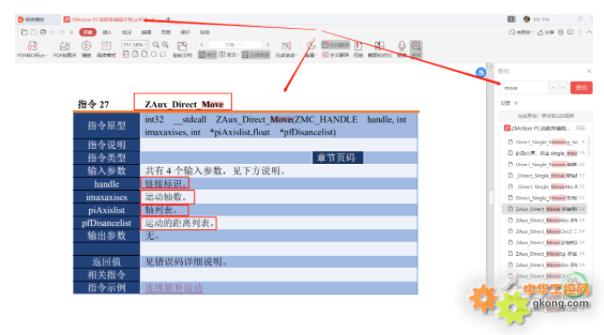
c.����������PC�����փ���ZAux_Direct_Move�������÷����ڲۺ����о������a���M�ж��S���a�Ĺ��܌��F��
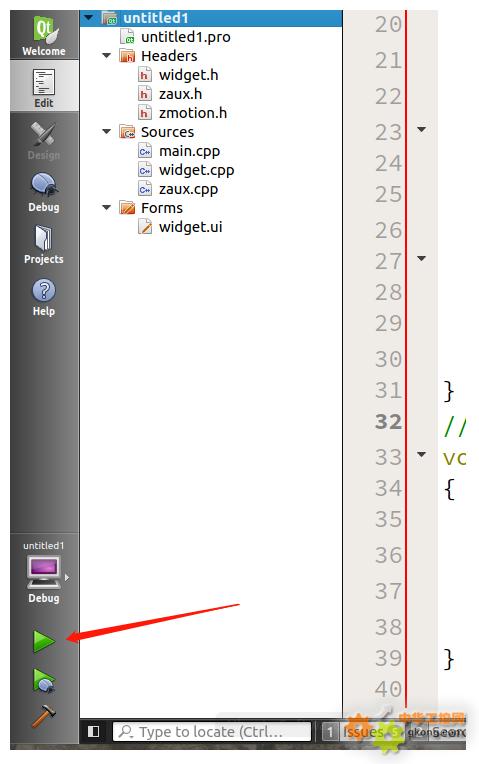
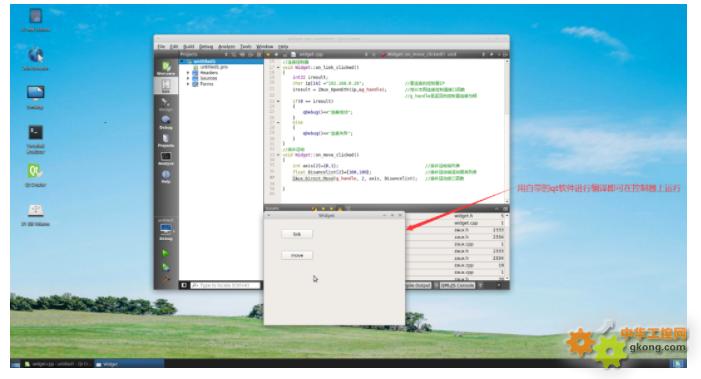
9�����gQt���yԇ���܌��FЧ����
a.�Ȍ�Qt�Ŀ�M�о��g��
b.�c��link���o���B�ӿ�����������ZDevelopܛ��ͬ�r�B�ӿ����������ڱO�y���������S������
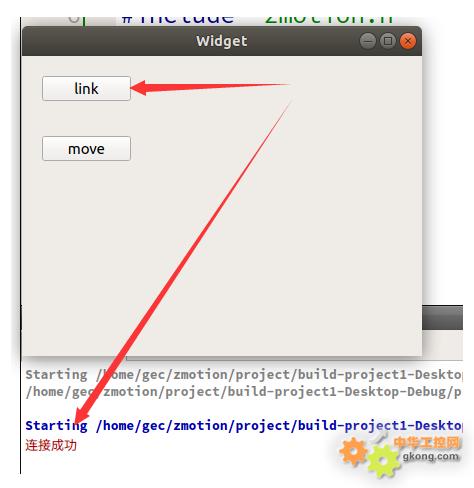
ע�⣺��λ�C����̫�W�B�ӿ������r����Ҫ��������PC��ͬһ�W���²����B�ӳɹ���
10��PC�_�l��Qt�������d�����������\��
PC�ϵ�Qt�Ŀ����ͨ�^U�P����WicSCPܛ�������d���������С�
�����\�Ӽ��gXPLC516E ���_��ʽLinux ƽ�_ʹ�ã��ϣ���——���\�Ӽ��gXPLC516E����������Linux Qt �_�l�����v���@�
��Ո�ڴ������\�Ӽ��gXPLC516E ���_��ʽLinux ƽ�_ʹ�ã��£���——XPLC516E �\�ӿ����_�lչʾ�����\��+ҕ�X��չ��ʾ�����ڃ��ݣ����ʲ����e�^Ŷ��
����̌W���ݣ�Ո�Pע���\��С���ֵ��Ź���̖��
���������\��С����ԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
|

