|

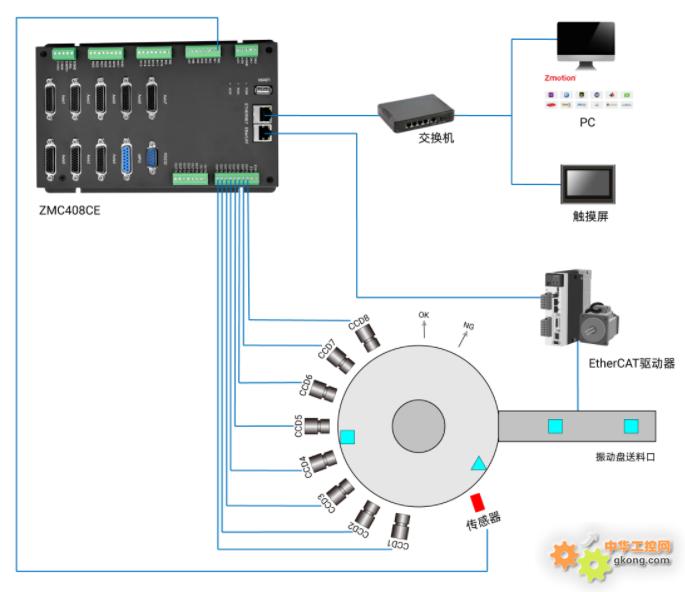
������Ҫ��B���\�Ӽ��gEtherCAT�������ڶ�ͨ��ҕ�X�w���c���c����ݔ���ϵđ��ã����ø�����ZMC408CE���������������Ȳ�����FPGA���FӲ��λ�ñ��^ݔ��������ݔ�����ܣ����F�\�ӿ���+��ͨ��ҕ�X�w���c����ݔ�����ܡ�
һ.Ӳ����B
ZMC408CE�����\���Ƴ���һ����S������EtherCAT�����\�ӿ�����������EtherCAT��EtherNET��RS232��CAN��U�P��ͨӍ�ӿڣ�ZMCϵ���\�ӿ������ɑ����ڸ��N��ҪÓ�C���C�\�еĈ��ϡ�

ZMC408CE֧��8�S�\�ӿ��ƣ����ɔUչ��32�S��֧��ֱ�����a������A�����a�����g�A�����������a�����݆������X݆��ͬ�����S�ȹ��ܡ�
ZMC408CE֧��8�S�\�ӿ��ƣ��ɲ����}�_�S�������a����������EtherCAT�����S��ͨ��IO����24��ݔ��ں�16��ݔ���ڣ�����IO�����IO��EtherCAT���100us��ˢ�����ڡ�
ZMC408CE֧��8��ͨ����Ӳ�����^ݔ����Ӳ�����r�����\���о���ݔ����߀֧��8ͨ��PWMݔ����������ݔ���ڞ�OUT0-7��֧��8��ͨ��ͬ�r�|�lӲ�����^ݔ�������ڶ�ͨ����ҕ�X�w�Ĉ��ϵȡ�
ZMC408CE֧��PLC��Basic��HMI�M�B���N���̷�ʽ��PC��λ�CAPI����֧��C#��C++��LabVIEW��Matlab��Qt��Linux��VB.Net��Python�Ƚӿڡ�

ZMC408CE���ø߾���PSOλ��ͬ��ݔ�����ܣ��ڼӹ��A���c�����r��ʹ�M���Мp���{�����ڸ��ټӹ��Ĉ�����Ҳ�ܿ��Ƽ���ݔ���ĵ��g��ݔ����
ZMC408CE��PSO������Ό��Fҕ�X�w�ģ�Ո��Ҋ�����f���ͅ������̡�
��.ҕ�X�w��
ᘌ����y��ҕ�X���ģ����aЧ�ʲ���߆��}����һЩ���È��ϣ�Խ��Խ���ʹ��ҕ�X�w�ā����ҕ�X���չ��ܡ����C�����ռȶ���܉�E�\�ӣ����\�е������c�r���\���S��ͣ��˲�g����w��ץ�ĵĹ��ܡ������^�����ƄәC����ֹͣ���Ķ���ʡ�C���\�Еr�g���M��Ч�ʣ������ܱ��C�\�о��ȡ�
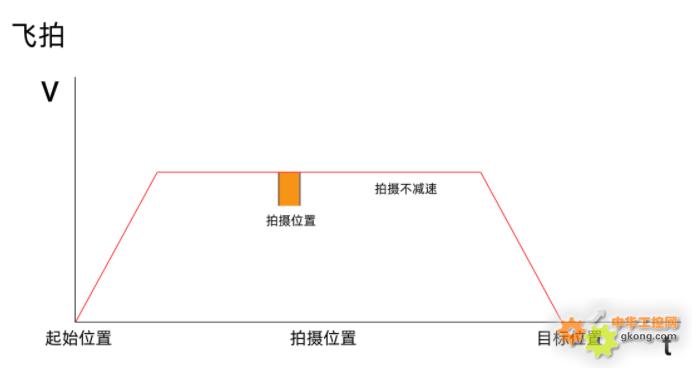
��1���ھ��ȱ��C��ͬ�r�����Բ��p�٣�v-t�D���¡�
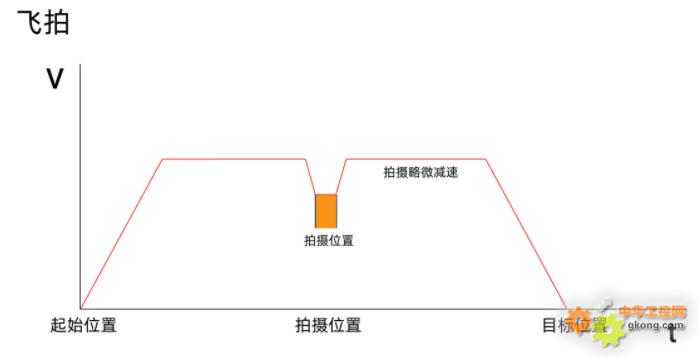
��2���ھ��Ȳ������r�£����������٣��ֶ��\�У����ٶȲ�����0��v-t�D���¡�
��.PSO�|�l�w��
�鱣�Cҕ�X�w�ĵľ��ȣ���Ҫ�ڸ����\�ӵĈ�������|�l���գ�ͨ�^��������PSO���ܿɸ����B�m���|�lݔ������ʹ���|�l�w����̖֮��ݔ��������һ���}�_��푑���
PSO������HW_PSWITCH2Ӳ�����^ݔ��ָ��F��
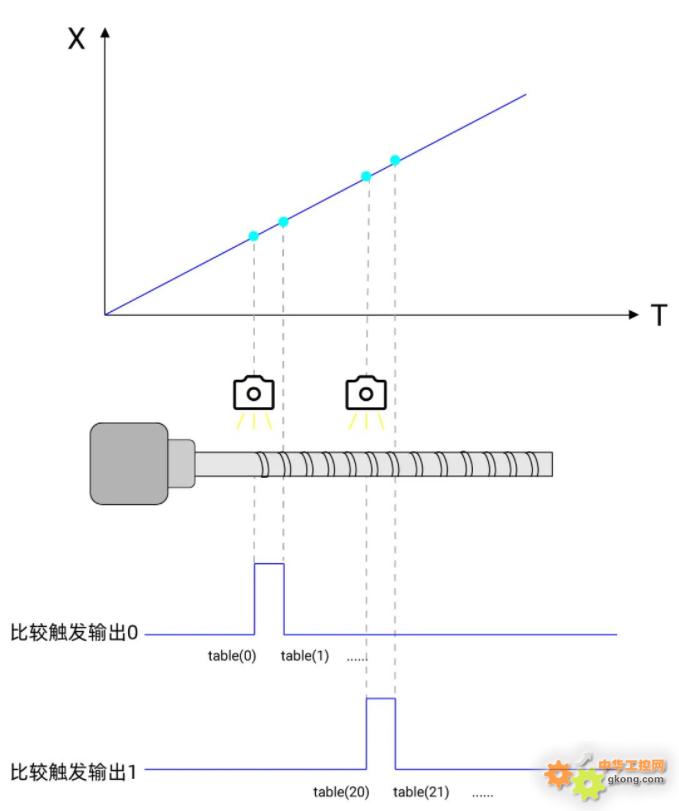
PSO(position synchronized output)��λ��ͬ��ݔ�������|��ͨ�^�ɼ����r�ľ��a������λ��(�o���a����ʹ��ݔ�����}�_λ��)�c���^ģʽ�O����λ���M�б��^������OP����ͬ��ݔ����̖��PSOʾ��D���¡�

PSOһ���c������(���c�z�����y���O��)ͬ��ݔ����̖�M����λͬ�������\��܉�E�������A���Ժ㶨�Ŀ��g(���ߺ㶨�r�g)�g���|�lݔ���_�P���������١��p�ٺ̈́��ٶΣ��Ķ����F�}�_��������������ڱ��ӹ����w�ϡ�
PSO���ܵ����c�����ܸ����ҷ�����ݔ����̖�����ݔ���������ߣ������܉��������\��܉�E���Թ̶��ľ��x�|�lݔ����̖�����ÿ��]���w�ٶȡ�
����ֱ�������Ժܿ���ٶ��\�ӣ����ڈA�Dz��֜p�ٵ�ͬ�rҲ�ܱ��Cݔ���g��㶨��ͨ���A�Ǽӹ������������ӹ��^����ռ�б��^С�IJ��֣��@���ڱ��C�ӹ�Ч����ͬ�r���Ϳ�������ȵ���߮a�ܡ�
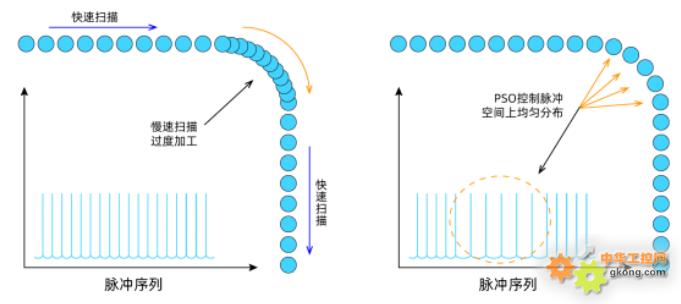
ZMC408CE�\�ӿ�������PSO�����ܑ������D�Pҕ�X�Y�x�C�ϣ����ٿ���ҕ�X�w�ĺY�x���߾����c�z�ӹ����߾��ȼ���ӹ��ȑ��Ã������£�
��1���Ɍ��r�����D�P��ӛ䛾��a���ķ���λ�ã�
��2������ݔ��ڽӂ��������Б���ӛ��������λ�ã�
��3��PSOӲ��λ�ñ��^ݔ���ɽ�2-8�����C�M��ҕ�X�w�ġ��z�y�͜y����
��4��PSOӲ��λ�ñ��^ݔ���ɽӴ���ڣ���ҕ�X�ęz�y�Y���M�������Y�x���

ͨ�^��ӱP�����ݔ�͵����������D�_�����ͨ�^������ȥ�Б����ϵ��������ͨ�^ZMC408CE�ĸ����i��ݔ���ӛ䛁��ϵČ��Hλ�ã����D�P�D�ӵ�ҕ�X�z�y��λ�r��������ͨ�^����ݔ�����|�l���C���գ�Ȼ���M�ЈD��̎���\�㣬�������A�O�Ę˜ʙz�y�l���M���Ԅәz�y�Y�x����������Ʒ��
������ԃ�D�Pҕ�X�Y�x���ã�Ոϵ���\�Ӽ��g���P�ˆT��
��.PSO���܌��Fָ��
�|�l�B�mҕ�X�w�ĵ�������HW_PSWITCH2��HW_PSWITCH2��Ҫ�����O���|�lģʽ�ͱ��^ݔ����λ�ã�����ģʽ�ɴ���HW_TIMERӲ�����r��ʹ�ã����ʿ���ݔ���r�̡�
1.HW_PSWITCH2--����Ӳ��λ�ñ��^ݔ��
HW_PSWITCH2(1,opnum,opstate,tablestart,tableend[,direction])
��ָ��ģʽ�ܶ࣬�m���ڲ�ͬ�Ĉ��ϣ�֧��һ�S���S���S�ı��^��������Ҫ��TABLE���^�c��ģʽ1��ģʽ3չ�_�f��������ģʽ��ҊBasic�����փԡ�
ÿ���S���и��Ե�Ӳ�����^ݔ�����_�^��
�xȡ�Z����Buff = HW_PSWITCH2([axisnum])
��1��Mode=1:���S���^
mode��1-���ӱ��^��
opnum��������ݔ����
opstate����һ�����^�c��ݔ����B
tablestart����һ�����^�c�^����������TABLE��̖
tableend�����һ�����^�c�^����������TABLE��̖
direction����һ���c�Д��0����ؓ��1��������-1��ʹ�÷���
��ģʽ�^�麆�Σ���Ҫ����TABLE�Ĵ���������Ҫ���^ݔ����λ�������ȴ惦��TABLE�Ĵ�����Ȼ��PSO����OP��ÿ���_һ�����^�c��λ�ñ㷴�Dһ�Σ�ֱ��ȫ�������c���^��ɡ�ʾ��D���£�P��ʾ���^�c��չʾ�������^�c��OPݔ����r��

��2��Mode=2��������^�c
HW_PSWITCH2(2)
mode��2-ֹͣ���h���]��ɵı��^�c
ʹ��ǰ��Ҫ�{�ô�ģʽ��������ܛ]�б��^��ɵĔ�����ʹ���^����Ҳ���l�ʹ����ֹͣ���^��
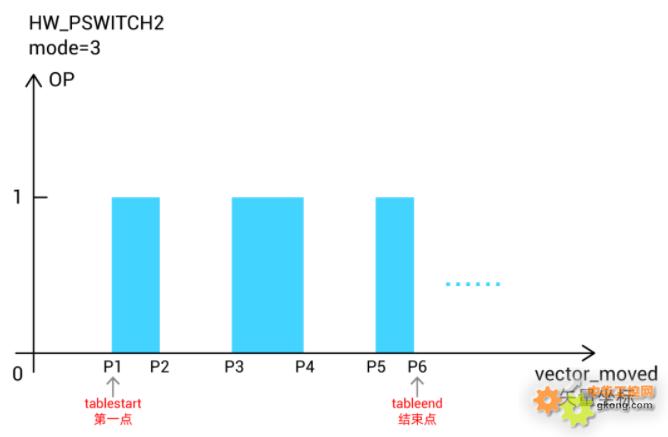
��3��Mode=3:ʸ�����^��ʽ
mode��3-���ӱ��^��
opnum��������ݔ����
opstate����һ�����^�c��ݔ����B
tablestart����һ�����^�cVECTOR_MOVED����TABLE��̖
tableend�����һ�����^�cVECTOR_MOVED��������TABLE��̖
�f�������^�c����TABLE�У�ÿ���_һ�����^ʸ��λ��OP���Dһ�Ρ�
ʹ��ʸ�����x���^�r���cVECTOR_MOVED�M�б��^�����h�B�m�\��ǰ�O��VECTOR_MOVED��ʼֵ��
2.HW_PS2AXISNUM--�O��PS2�S̖
HW_PS2AXISNUM(axisnum1)=axisnum2
axisnum1�����_�S̖
axisnum2�����H�������S̖
HWָ���ІΪ��ľ��_�^����ָ�����ڰћ]��ʹ�õ��S��HW_PSWITCH2���_�؏�����������ָ��ǰ�\�ӵ����S,�����Ԍ���ǰ�����Sͬ�r���������^��
3.VECTOR_MOVED--��ǰ�\�Ӿ��x
VECTOR_MOVED=VAR
������VAR�����S��ǰ�\�ӵľ��x��units��λ��
�����S���a��ʸ�����x��ʹ��֮ǰ����ք����㣬ʹ��ģʽ3ǰע���ָ��ij�ʼֵ�O���Ƿ����_��
��.���S��ͨ��PSOҕ�X�w��
���S��ͨ��PSOҕ�X�w�����چ��S�\���^�����\�ӵ�ָ��λ���|�l������ͬ���C�M���w�ģ��|�lλ�Á�Դ�����������O��Ҳ����ͨ�^�������i��ץȡ��
�w����Ҫ֧��Ӳ��λ�ñ��^ݔ��������ݔ�������Լ�����������HWͨ���Ŀ�������ZMC408CE��8��������HWͨ��������ͬ�r�o���Cݔ����̖�|�l�w�IJɼ���
����ʾ����OUT(0)��OUT(1)ͬ�rݔ����
RAPIDSTOP(2)
WAIT IDLE(0)
BASE(0)
ATYPE=1 '�}�_�S��ͣ����^����λ��DPOS
'ATYPE=4 '�����a�����}�_�S��ͣ����^���a����λ��MPOS
UNITS=5000
ACCEL=1000
DECEL=1000
SPEED=100
SRAMP=50
DPOS=0
MPOS=0
OP(0,OFF)
OP(1,OFF)
AXIS_ZSET(0)=19 '���a������ݔ��
HW_PS2AXISNUM(1)=0 '���S1���_ָ���S0��-1ȡ��
HW_PS2AXISNUM(0)=0 '���S0���_ָ���S0��-1ȡ��
HW_PSWITCH2(2) AXIS(0) '����S0���^�c
HW_PSWITCH2(2) AXIS(1) '����S1���^�c
TABLE(0,50,52,75,77,100,102,125,127,150,152,175,177) '�O�ñ��^�c��table�б�
TABLE(20,50,52,60,62,70,72,80,82,100,101,130,131,140,141) '�O�ñ��^�c��table�б�
HW_PSWITCH2(1,0,1,0,11,1) AXIS(0) 'Ӳ��λ�ñ��^ݔ����ᘌ�OUT(0)
HW_PSWITCH2(1,1,1,20,33,1) AXIS(1) 'Ӳ��λ�ñ��^ݔ����ᘌ�OUT(1)
TRIGGER '�|�lʾ����
MOVEABS(200)
END
ʾ����������D��ʾ���ɘ�4��ͨ���IJ��Σ����Ξ��S0��Ŀ��λ�á��S0���ٶȡ�ݔ����0��ݔ����1��
ݔ��0��ݔ��1֧��ͬ�r�M�б��^ݔ��������ɔ_���������S0��λ��ݔ����

��.���S��ͨ��PSOҕ�X�w��
���S��ͨ��PSOҕ�X�w����Ҫ�����ڶ������C�ڶ��S���a�\�ӕr��Ҫ���cPSOҕ�X�w�ĵ���r��
���Ŀ�г�����Ҫ�����ڲ��aֱ������a�A��܉�E���M�б��^ݔ�����@���r����������a܉�E��ֳɌ����ĸ����S���˔������\�������dz������ό��H���á�
���Ќ��ڶ��Sλ�ñ��^�|�l�w�ĕr���҂�������ʹ�ò��a�\��ʸ���ϳɾ��x���_���������a�\������λ�ã����@���������O�ñ��^�cλ���M�б��^��
����ʾ����OUT(0)��OUT(1)����ͬ���S0���S1���S���a��PSOݔ����
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1)
ATYPE=1,1
UNITS=1000,1000
ACCEL=1000,1000
DECEL=1000,1000
SPEED=100,100
SRAMP=50,50
MERGE=1 '�_���B�m���a
DPOS=0,0
MPOS=0,0
OP(0,OFF)
OP(1,OFF)
VECTOR_MOVED=0
AXIS_ZSET(0)=19 '���a������ݔ��
HW_PS2AXISNUM(1)=-1 'ȡ���O��
HW_PS2AXISNUM(1)=0 '�O��PS2�S̖,���S1���_ָ���S0
HW_PSWITCH2(2) AXIS(0) '����S0���^�c
HW_PSWITCH2(2) AXIS(1) '����S1���^�c
TABLE(0,50,52,75,77,100,102,125,127,150,152,175,177) '�O�ñ��^�c��table�б�
TABLE(20,50,55,80,88,100,102,130,135,160,162,175,180) '�O�ñ��^�c��table�б�
HW_PSWITCH2(3,0,1,0,11) AXIS(0) 'Ӳ��λ�ñ��^ݔ����ᘌ�OUT(0)
HW_PSWITCH2(3,1,1,20,31) AXIS(1) 'Ӳ��λ�ñ��^ݔ����ᘌ�OUT(1)
TRIGGER '�|�lʾ����
BASE(0,1) '���S���a
MOVEABS(40,40) 'ֱ�����a
MOVECIRCABS(40,-40,40,0,1) '�A�����a
MOVEABS(0,0) 'ֱ�����a
END
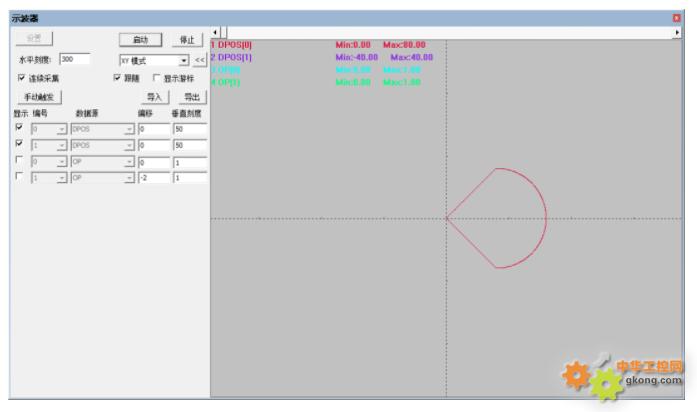
ʾ����������D��ʾ���ɘ�4��ͨ���IJ��Σ����Ξ��S0��Ŀ��λ�ã��S1��Ŀ��λ�á�ݔ����0��ݔ����1��
ݔ��0��ݔ��1�ڲ�ͬ��λ��ͬ�r�M�б��^ݔ����ÿ��һ�����^�cλ��ݔ���ڷ��Dһ�Σ��������^12�Σ�ÿ��ݔ���}�_���ȿ�����2���}�_�Ⱦ�֧�֡�
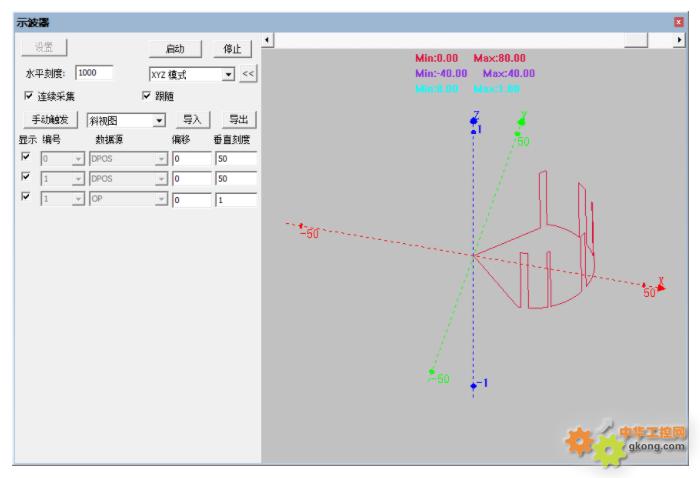
YTģʽ�������S�r�g׃����

XYģʽ�����S�ϳɲ��a܉�E��
XYZģʽ����ͨ�������ϳ�܉�E��OP(0)�SXY�S�ϳ�ʸ�����x׃����r��
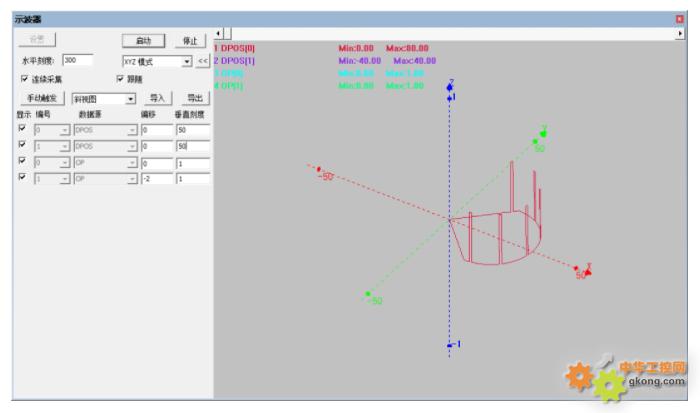
XYZģʽ����ͨ�������ϳ�܉�E��OP(1)�SXY�S�ϳ�ʸ�����x׃����r��
���Σ����\�Ӽ��g�\�ӿ�������ͨ��PSO��ҕ�X�w���c����ݔ�����ͷ������@�
���ྫ�ʃ���Ո�Pע“���\��С����”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
|

