

ĪĪę²čįŻ║▒Š╬─═©▀^╩╣ė├╩®─═Ą┬ļŖÜŌPLC TW238LFDC24DT╩╣ė├CANopen═©ą┼Ą─ĘĮ╩ĮüĒ┐žųŲMOTEC SD388BųŪ─▄▓Į▀M“īäėŲ„üĒ┐žųŲļŖÖCĄ─╦┘Č╚─Ż╩Į┐žųŲ║═╬╗ų├─Ż╩Į┐žųŲĪŻ
ĪĪĪĪCANopen╩Ūę╗ĘN╝▄śŗį┌CAN(┐žųŲŠųė“ŠW┬Ę)╔ŽĄ─Ė▀īė═©ėŹģfČ©Ż¼░³└©═©ėŹūėģfČ©╝░įOéõūėģfČ©│Żį┌ŪČ╚ļ╩ĮŽĄĮyųą╩╣ė├Ż¼ę▓╩Ū╣żśI┐žųŲ│Żė├ĄĮĄ─ę╗ĘN¼Fł÷┐éŠĆĪŻ
ĪĪĪĪMOTEC ųŪ─▄▓Į▀M“īäėŲ„╝»│╔┴╦CANopenģfūhŻ¼ĘĮ▒Ńė├æ¶═©▀^Ė„ĘN╔Ž╬╗ÖC(PLCĪóHMI╗“Ųõ╦³▀\äė┐žųŲŲ„)═©ėŹĪŻMOTEC ųŪ─▄▓Į▀M“īäėŲ„▓╔ė├╝»│╔CANąŠŲ¼▀MąąCANopen═©ėŹŻ¼╩╣ė├┤╦╣”─▄┐╔“īäėMOTEC ųŪ─▄▓Į▀M“īäėŲ„ĪóūāĖ³ģóöĄęį╝░▒OęĢMOTEC ųŪ─▄▓Į▀M“īäėŲ„ĀŅæBĄ╚ČÓĒŚ╣”─▄ĪŻ
ĪĪĪĪ▒Š└²ųąŻ¼╩╣ė├Ą─╩Ū╝»│╔┴╦CANopenĄ─╩®─═Ą┬ļŖÜŌPLC TW238LFDC24DTüĒ┐žųŲMOTEC SD388B▓Į▀M“īäėŲ„Ż¼ė╔ė┌ī”ė┌╩®─═Ą┬PLCüĒšfŻ¼ø]ėą╝»│╔ī”ė┌ĘŪ╩®─═Ą┬ļŖÜŌŲĘ┼ŲĄ─═©ė├╦┼Ę■“īäėŲ„║═▓Į▀M“īäėŲ„Ą─DS402ģfūhĄ─┐žųŲŻ¼╦∙ęį╬ęéā═©▀^DS301ā╚ęÄĘČĄ─SDOüĒīŹ¼Fī”“īäėŲ„Ą─═©ą┼ĪŻ
ĪĪĪĪ1ĪóäōĮ©╣ż│╠

ĪĪĪĪ▒Š└²ųą╩╣ė├▀ē▌ŗ╠▌ą╬łDĄ─ĘĮ╩ĮŠÄ│╠
ĪĪĪĪäōĮ©═Ļ│╔Ą─Įń├µ╚ńŽ┬

ĪĪĪĪ2Īó╠Ē╝ėSD388BĄ─EDS╬─╝■
ĪĪĪĪ³cō¶▓╦å╬Ö┌Ą─╣żŠ▀—>įOéõÄņüĒ╠Ē╝ėSD388BĄ─EDS╬─╝■Ż¼░▓čb║¾Ą─EDS╬─╝■┐╔ęįį┌
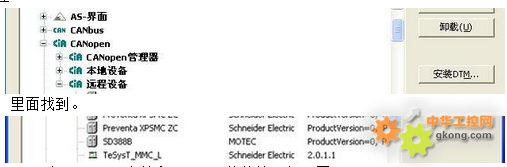
ĪĪĪĪ└’├µšęĄĮĪŻ

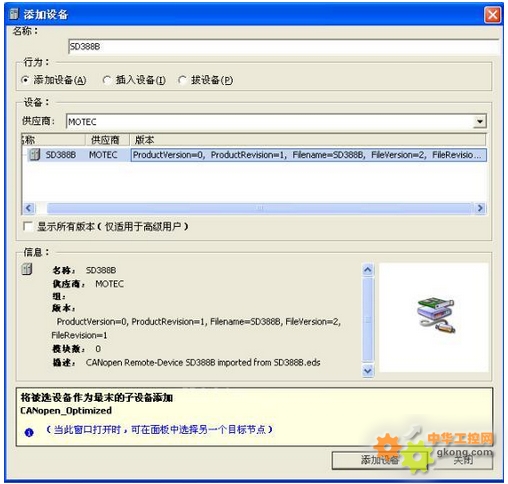
ĪĪĪĪ3Īó╠Ē╝ėCANopenų„šŠ║═SD388BĄ─Å─šŠŻ¼╚ńŽ┬łD
ĪĪĪĪ4ĪóįOų├SD388BĄ─PDOė│╔õŻ¼▒Š└²╩╣ė├Ą─╩ŪSDOüĒ┐žųŲŻ¼ę“┤╦īóRPDOĄ─ė│╔õ╚źĄ¶ĪŻ╚ńłD

ĪĪĪĪ5ĪóįOų├║├▓©╠ž┬╩║══¼▓Įł¾╬─Ą╚ģóöĄ║¾Ż¼ŠÄīæ│╠ą“Ż¼╩╣ė├CIA405Äņ╝»│╔Ą─SDO═©ą┼üĒūxīæ“īäėŲ„ā╚Ą─ā╚╚▌Ż¼╚ńłD
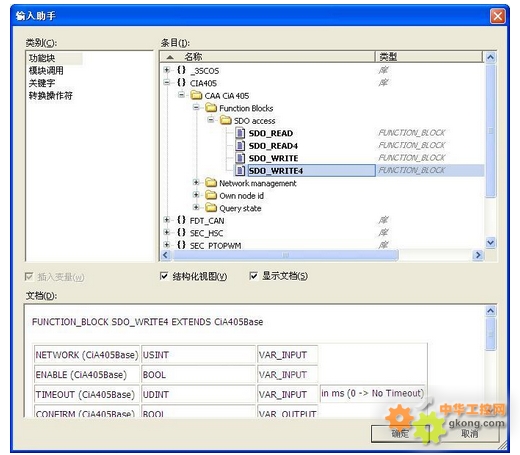
ĪĪĪĪŠÄīæ═Ļ│╔Ą─│╠ą“╚ńŽ┬

ĪĪĪĪė├æ¶┐╔ęįį┌www.motec365.com╔ŽŽ┬▌dĄĮŽÓĻPĄ─│╠ą“ĪŻ
ĪĪĪĪ6Īó│╠ą“š{įć
ĪĪĪĪ▒Š└²ųąŻ¼╩╣ė├į┌ŠĆš{įćĄ─ĘĮ╩ĮŻ¼ė├üĒš{įć╦┘Č╚┐žųŲ║═╬╗ų├┐žųŲŻ¼
ĪĪĪĪAĪó╦┘Č╚─Ż╩Į┐žųŲŻ║
ĪĪĪĪ═©▀^CANopen╩╣ė├╦┘Č╚─Ż╩Į┐žųŲŻ¼ąĶę¬ų┴╔┘ā╔éĆ╣”─▄ēKŻ║
ĪĪĪĪ1)Īóīó«öŪ░Ą─┐žųŲ─Ż╩ĮįOų├│╔╦┘Č╚┐žųŲĘĮ╩ĮŻ¼╝┤īó6060h╦„ę²Ż¼00hūė╦„ę²ųąĄ─ā╚╚▌Ė─│╔3;
ĪĪĪĪ2)ĪóįOų├ä“╦┘▀\äėĄ─▐D╦┘Ż¼╝┤Ž“60FFh╦„ę²Ż¼00hūė╦„ę²ųąīæ╚ļ«öŪ░▀\ąąĄ─▐D╦┘ĪŻ
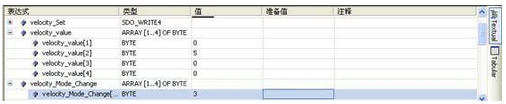
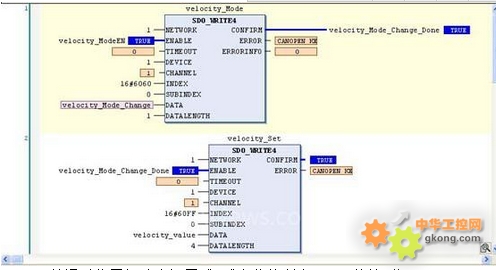
ĪĪĪĪ╚ńłDųąŻ¼įOų├velocity_Mode_Change×ķ3Ż¼įOų├velocity_value×ķ5*256Ż¼╝┤1280rpm;
ĪĪĪĪ╩╣ė├į┌ŠĆš{įćĮovelocity_ModeENę╗éĆ╔Ž╔²čžŻ¼─Ū├┤ļŖÖCĢ■ä“╦┘▐DäėŻ¼▐D╦┘×ķ60FFhā╚įOČ©▐D╦┘ĪŻ╚ńŽ┬łD

ĪĪĪĪļŖÖCåóäėęį║¾╚ńłD
ĪĪĪĪ3)Īó┐╔ęį═©▀^īó─┐ś╦╦┘Č╚įOų├│╔0╗“š▀īó┐žųŲūų6040hĄ─Ą┌8╬╗īæ1Ż¼
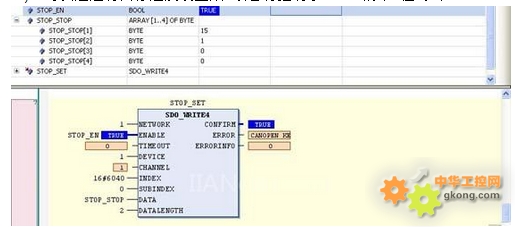
ĪĪĪĪ4)Īóė├æ¶╚ń╣¹ąĶę¬įOČ©ŲõėÓģóöĄŻ¼└²╚ń╝ė╦┘Č╚Ż¼£p╦┘Č╚Ż¼ļŖÖCļŖ┴„Ą╚ģóöĄŻ¼šłģóęŖė├æ¶╩ųāį║═EDS╬─╝■└’├µČ©┴xĄ─ā╚╚▌ĪŻ
ĪĪĪĪBĪó╬╗ų├─Ż╩Į┐žųŲŻ║
ĪĪĪĪ═©▀^CANopen╩╣ė├╦┘Č╚─Ż╩Į┐žųŲŻ¼ąĶę¬ų┴╔┘╚²éĆ╣”─▄ēKŻ║
ĪĪĪĪ1)Īóīó«öŪ░Ą─┐žųŲ─Ż╩ĮįOų├│╔╬╗ų├┐žųŲĘĮ╩ĮŻ¼╝┤īó6060h╦„ę²╦„ę²ųąĄ─ā╚╚▌Ė─│╔1;
ĪĪĪĪ2)ĪóįOų├╬╗ų├┐žųŲĄ─▀\äėŠÓļxŻ¼╝┤īó▀\ąąŠÓļxīæ╚ļ607Ah╦„ę²ųą;
ĪĪĪĪ3)ĪóŽ“┐žųŲūų6040hųąīæ╚ļåóäė╬╗ų├┐žųŲĄ─ųĖ┴ŅŻ¼▒Š└²ųąū÷ŽÓī”▀\äė╬╗ų├┐žųŲŻ¼╝┤Ž“6040hųąīæ╚ļ0x005F;
ĪĪĪĪ4)Īó▒Š└²ųąŻ¼╠Ē╝ė┴╦ū÷╬╗ų├┐žųŲĢrūŅ┤¾▐D╦┘Ą─įOČ©Ż¼╝┤Ž“╦„ę²6081hųąīæ╚ļįOČ©Ą─╬╗ų├┐žųŲĄ─ūŅ┤¾▐D╦┘ĪŻ
ĪĪĪĪš¹éĆöĄō■īæ╚ļųĄ╚ńŽ┬
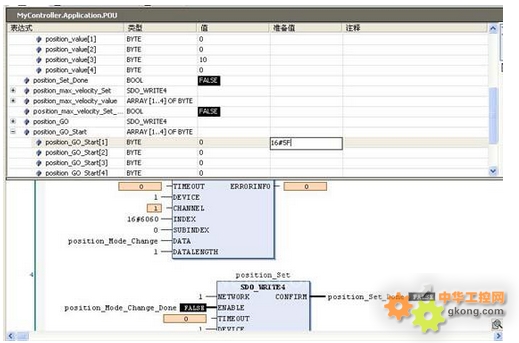
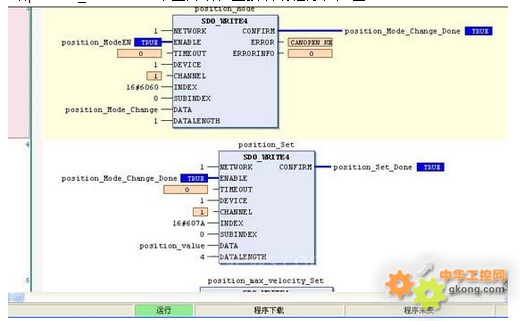
ĪĪĪĪįOų├position_Mode_Change(6060h)×ķ1Ż¼įOų├position_value(607Ah)×ķ0x000A0000Ż¼įOų├position_max_velocity_value(6081h)×ķ0x00500Ż¼įOČ©position_GO_Start(6040h)×ķ0x005F;
ĪĪĪĪĮoposition_ModeENę╗éĆ╔Ž╔²čžŻ¼ų▒Įėåóäė│╠ą“Ż¼╚ńłD
ĪĪĪĪ5)Īó╚ń╣¹ąĶę¬═Żų╣«öŪ░▀\ąąŻ¼ų╗ąĶę¬īó6040hĄ─Ą┌░╦╬╗įOų├│╔1Ż¼╚ńłD

ĪĪĪĪ6)Īóė├æ¶╚ń╣¹ąĶę¬įOČ©ŲõėÓģóöĄŻ¼└²╚ń╝ė╦┘Č╚Ż¼£p╦┘Č╚Ż¼ļŖÖCļŖ┴„Ą╚ģóöĄŻ¼šłģóęŖė├æ¶╩ųāį║═EDS╬─╝■└’├µČ©┴xĄ─ā╚╚▌ĪŻ
ĪĪĪĪūóęŌŻ║×ķ┴╦ĘĮ▒Ńė├æ¶▒O┐žš{įćŻ¼▒Š└²ųą╩╣ė├į┌ŠĆ─ŻöMĄ─ĘĮ╩ĮŻ¼Ę┬šµ▒O┐žPLCĄ─äėū„║═įOČ©ģóöĄŻ¼ė├æ¶┐╔ęį╩╣ė├┘xųĄšZŠõüĒī”ŽÓĻPĄ─ūā┴┐▀Mąą▓┘ū„ĪŻ
ĪĪĪĪūóęŌŻ║ė╔ė┌▒Š└²╩╣ė├SDO▓┘ū„Ż¼╚ńąĶ╩╣ė├PDO▓┘ū„Ż¼šłįöęŖĪČMOTECŠWĮj▓Į▀M“īäėŲ„CANopen▓┘ū„╩ųāįĪĘĄ─ ĖĮõøB MOTEC“īäėŲ„CANopen▓┘ū„┴„│╠╩Š└²ę╗╣ØĪŻ