伺服電機(jī)運(yùn)動(dòng)控制專用芯片
——直流有刷伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)、直線電機(jī)驅(qū)動(dòng)器的核心算法芯片
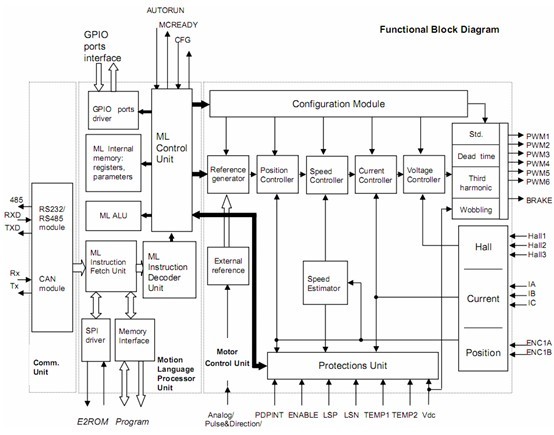
MotionDSP芯片是我公司經(jīng)過(guò)多的研究開(kāi)發(fā)出的一種基于實(shí)時(shí)多任務(wù)操作系統(tǒng)的、開(kāi)放式的、空間失量控制的伺服電機(jī)核心算法模塊。算法寫(xiě)入自主研發(fā)的專用理器內(nèi)部,具有良好的用戶接口和開(kāi)放的二次開(kāi)發(fā)函數(shù),可適用與H橋驅(qū)動(dòng)的直流伺服電機(jī)和3相全橋驅(qū)動(dòng)的無(wú)刷伺服電機(jī)的伺服控制、速度控制和轉(zhuǎn)矩控制,目前算法已經(jīng)成功應(yīng)用于從24瓦到3千瓦的伺服驅(qū)動(dòng)器中。
功能說(shuō)明:
- 可控制交流伺服電機(jī)(PMSM)、無(wú)刷伺服電機(jī)(BLDC)、直流伺服電機(jī)(Brushed Motor)、兩相和三相步進(jìn)伺服電機(jī)(Stepper Motor)和直線電機(jī)(Brushless Linear Motor)。
- 電機(jī)的反饋可以使用:增量式編碼器(Incremental Encoder)、旋轉(zhuǎn)編碼器(SSI)、正余弦編碼器(Sin-Cos Encoder)、模擬量測(cè)速機(jī)(Tacho)、線性霍爾、絕對(duì)值編碼器。
- 只需要對(duì)電機(jī)的參數(shù)和驅(qū)動(dòng)器的參數(shù)進(jìn)行簡(jiǎn)單的設(shè)置就可以完成復(fù)雜的電機(jī)運(yùn)動(dòng)控制,不需要對(duì)處理器底層進(jìn)行編程。
- 可單個(gè)驅(qū)動(dòng)器或主從方式多驅(qū)動(dòng)器并行工作。
- 可實(shí)現(xiàn)開(kāi)環(huán)控制、全數(shù)字閉環(huán)控制,控制方式包括:內(nèi)部PLC閉環(huán)控制、外部模擬量給定閉環(huán)控制、外部脈沖和方向給定的閉環(huán)控制、外部抓怒給定的閉環(huán)控制。
- 驅(qū)動(dòng)器對(duì)外接口豐富,包括:增量式編碼器接口、霍爾傳感器接口、測(cè)速發(fā)電機(jī)接口、線性霍爾接口、正余弦編碼器接口、絕對(duì)值編碼器接口或旋轉(zhuǎn)編碼器接口;限位開(kāi)關(guān)接口;溫度傳感器接口;電機(jī)運(yùn)動(dòng)使能接口;通用配置IO口接口;電機(jī)U、V、W接口;
- 通信接口可使用:RS-232、 RS-485 、Can總線(支持CAN2.0和CAN Open通信協(xié)議)。
可通過(guò)計(jì)算機(jī)軟件方便的二次開(kāi)發(fā)電機(jī)運(yùn)動(dòng)控制功能,可以不需要上位機(jī)提供控制命令,系統(tǒng)上電就可以按照已設(shè)置的電機(jī)運(yùn)動(dòng)曲線工作。


