

優(yōu)傲官方ROS2驅(qū)動已發(fā)布
http://m.sharifulalam.com 2022-05-19 16:11 來源:丹麥優(yōu)傲機器人
優(yōu)傲官方ROS2驅(qū)動已發(fā)布
2022年5月4日,優(yōu)傲及合作伙伴正式發(fā)布了可與優(yōu)傲全產(chǎn)品線適配的ROS2開源驅(qū)動 Universal Robots ROS2 Driver。
這是業(yè)界較早發(fā)布的基于ROS2架構(gòu)的機器人驅(qū)動之一。得益于ROS2架構(gòu),此驅(qū)動相比于較早發(fā)布的UR ROS驅(qū)動具有低延遲、高安全性和中間層更加靈活的優(yōu)點。為方便用戶學(xué)習(xí)使用,軟件包中包含可執(zhí)行的launch file, 并可與MoveIt2結(jié)合使用。
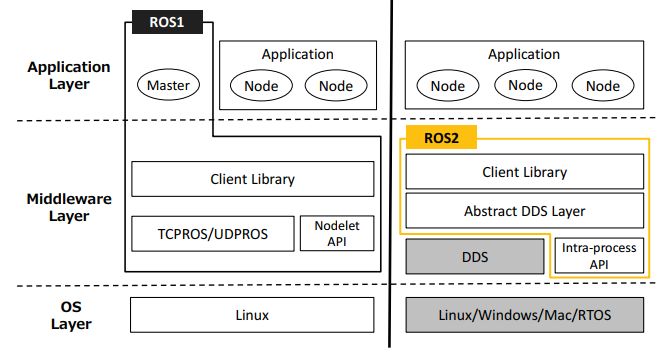
ROS1/ROS2架構(gòu)比較[1]
得益于優(yōu)傲機器人系統(tǒng)的開放性和接口多樣性,Universal Robots ROS2 Driver可與控制器進行運動指令、位置、速度、力、IO及安全狀態(tài)的交互。當(dāng)與實際機器人通訊時,可獲取機器人運動學(xué)標定數(shù)據(jù),以進行更為精確的運動控制。同時,此驅(qū)動也可與優(yōu)傲機器人離線仿真器URSim通訊,加快您的項目開發(fā)測試進度。
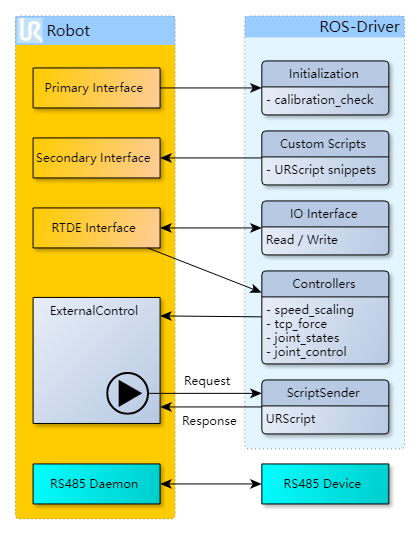
ur_robot_driver架構(gòu)概覽[2]
為使ROS2規(guī)劃的路徑在機器人上更加準確的實現(xiàn),除了經(jīng)典的關(guān)節(jié)軌跡控制器之外,Universal Robots ROS2 Driver在路徑規(guī)劃中加入了速度縮放控制器(speed scale joint trajectory controller)。該控制器將機器人實際速度比率及安全狀態(tài)納入軌跡規(guī)劃算法,減小由機器人實際速度比率、安全限制等造成的軌跡執(zhí)行偏差[3],從而實現(xiàn)了以下功能:
- 急停及安全停止時的程序暫停
- 急停及安全停止后的程序重啟
- 自動調(diào)整速度使其符合安全設(shè)置
- 在示教器上手動調(diào)整速度
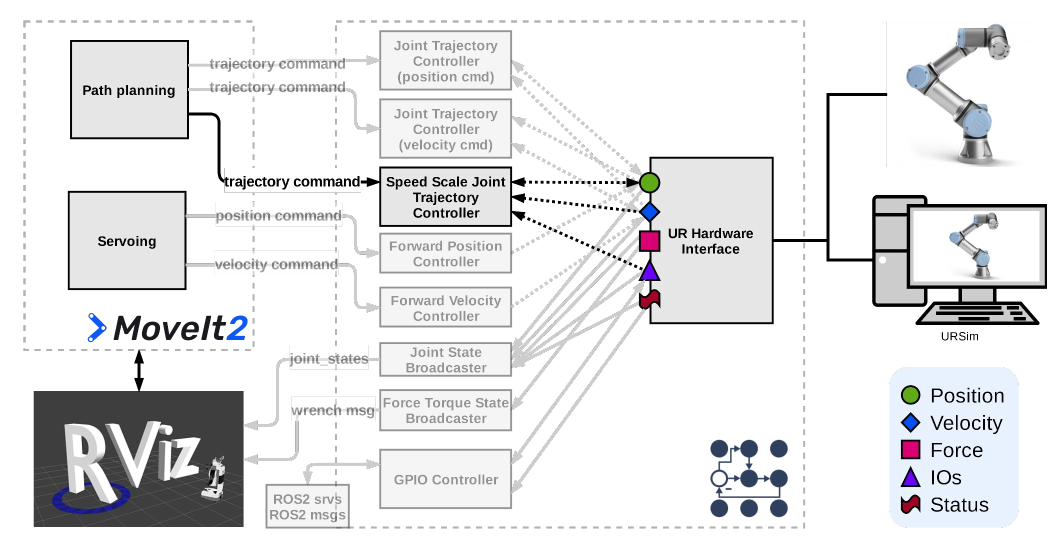
Universal Robots ROS2 Driver控制器概覽[4]
最新版本Universal Robots ROS2 Driver現(xiàn)在可在ROS2 Galactic Geochelone版本中通過rosdep binary安裝,并將支持Rolling Ridley 和 Humble Hawksbill版本。安裝指南及更多信息請見(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver),或參考ROS World 2021報告(https://vimeo.com/649651707)及演示文稿(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/blob/main/ur_robot_driver/doc/resources/2021-10_ROS_World_2021_Making_a_robot_ROS2_powered.pdf)。
有任何問題和反饋請您在GitHub issue(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/issues)或UR forum(https://forum.universal-robots.com/)中提出,或直接發(fā)送郵件至ROS@universal-robots.com
祝您開發(fā)順利!
參考信息:
[1].Maruyama Y , Kato S , Azumi T . Exploring the performance of ROS2[C]// the 13th International Conference. 2016.(https://ieeexplore.ieee.org/document/7743223/citations?tabFilter=papers#citations)
[2].Universal_Robots_ROS2_Driver/ur_robot_driver/README.md(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/tree/main/ur_robot_driver)
[3].Universal_Robots_ROS2_Driver/ ur_controllers/README.md(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/tree/main/ur_controllers)
[4].Making a robot ROS2 Powered - a case study using the UR manipulator. ROS World 2021(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/blob/main/ur_robot_driver/doc/resources/2021-10_ROS_World_2021_Making_a_robot_ROS2_powered.pdf)
相關(guān)新聞
- ? 曝特斯拉暫停人形機器人生產(chǎn),修改設(shè)計
- ? ABB推出三大全新機器人系列,強化中國機器人市場領(lǐng)導(dǎo)地位
- ? 世界機器人運動員8月大比拼
- ? 出口爆發(fā),中國工業(yè)機器人邁向高端
- ? 翼菲智能沖刺港交所 為國內(nèi)領(lǐng)先的綜合性工業(yè)機器人企業(yè)
- ? 2025RoBoLeague機器人足球聯(lián)賽總決賽在北京亦莊開賽
- ? 越疆CR 30H新品發(fā)布,行業(yè)最快30kg大負載協(xié)作機器人,來了!
- ? 雙展聯(lián)動,智啟未來:慕尼黑國際光博會與慕尼黑國際機器人及自動化技術(shù)博覽會開啟行業(yè)新篇章!
- ? 華龍訊達發(fā)布“龍芯+鴻蒙”工業(yè)機器人專用控制器
- ? 工業(yè)級機器人進入量產(chǎn)前夜,大摩預(yù)計2028中國機器人市場規(guī)模超千億美元
編輯精選
- ? PLC市場穩(wěn)定回暖,國產(chǎn)化進程加速推進
- ? 鴻道操作系統(tǒng)在京首發(fā) 突破“大小腦”核心技術(shù)開啟自主可控具身智能新紀元
- ? 2025年施耐德電氣創(chuàng)新峰會盛大開幕
- ? ABB 加速器中國周為創(chuàng)新加速
- ? 羅克韋爾自動化發(fā)布第十版《智能制造現(xiàn)狀報告》
- ? 西門子舉辦“Realize LIVE”大會
- ? 埃夫特牽頭成立 “高速高精技術(shù)創(chuàng)新聯(lián)合體”,助力長三角一體化發(fā)展
- ? 匯川技術(shù)分拆聯(lián)合動力上市,關(guān)聯(lián)交易增收引關(guān)注
- ? 東土科技參與國家重點研發(fā)計劃 ,共同研發(fā)工業(yè)智控創(chuàng)新技術(shù)
- ? 2025華南國際工業(yè)博覽會圓滿閉幕
工控原創(chuàng)
- ? 一文get六月工控自動化大事
- ? ABB加速器中國周:當(dāng)AI邂逅硬核工業(yè),一場自下而上的智造革命
- ? 點擊了解5月工控圈那些事兒
- ? 分拆上市還是出售?ABB機器人業(yè)務(wù)將何去何從
- ? 打造標桿案例及生態(tài)圈,ABB全力推動Ethernet-APL應(yīng)用加速
- ? 你關(guān)心的四月份工控大事全在這里
- ? 匯川技術(shù)2024年財報解析:多元化布局彰顯增長韌性
- ? 關(guān)稅政策讓美國工業(yè)自動化復(fù)蘇之路面臨不確定性
- ? ADI系統(tǒng)級創(chuàng)新方案深度賦能工業(yè)智能化與能源安全
- ? 32篇新聞,帶你回顧3月工控圈熱點


