
Bumblebee X助力Taiga Robotics通過AI驅動的視覺技術實現礦業自動化
http://m.sharifulalam.com 2025-07-30 13:35 來源:Bumblebee
在礦業機器人自動化的過程中,一次失敗可能帶來嚴重后果。惡劣的天氣、崎嶇的地形和重型機械共同構成了一個傳統技術無法應對的環境,而在這個環境下,精準、可靠和耐用性顯得尤為重要。
這正是Taiga Robotics所面臨的現實,也是他們努力解決的難題。
Taiga Robotics成立于2018年,最初專注于搜索與救援業務,之后逐漸發展成為礦業、核能及輕工業領域的機器人控制與自動化解決方案提供商。其旗艦產品Synapse是一款低代碼/無代碼的機器人編程平臺,內置AI功能,設計旨在簡化現場復雜的自動化任務。
最近,Taiga Robotics解決了礦業中的一個重大難題——自主桿操作,他們采用了Teledyne IIS的Bumblebee® X立體相機。Taiga的解決方案結合了先進的機器人控制軟件和高性能的立體視覺系統,能夠在復雜的戶外環境中準確理解和識別目標。
挑戰:在惡劣地形中實現桿操作自動化
在礦業領域,鉆桿操作是一項重復性高、風險大的任務,傳統上完全依賴人工操作。要實現自動化,僅僅使用機器人臂是不夠的,還需要在低紋理、光照變化大且常有振動的環境下提供精準的實時3D感知。
市面上的視覺系統無法滿足這些要求。Taiga需要一款具備深度精度、適應惡劣環境、并兼容神經網絡的立體相機,才能確保AI驅動的自動化系統在現場能夠正常運行。
解決方案:Bumblebee X立體相機
經過對多個3D視覺方案的評估后,Taiga選擇了Bumblebee X,這是一款專為機器人應用設計的堅固高分辨率立體視覺系統。

Taiga Robotics的自動化系統將Bumblebee X相機集成在一個機器人起重平臺上,解決了現場部署中的各種挑戰。
Taiga Robotics的首席運營官Ilija Jovanovic表示:“這款機器人相機對于礦業領域來說極為重要,因為環境的苛刻條件和設備的巨大規模一直以來都是我們面臨的一大難題。”
為什么選擇Bumblebee X?
寬立體基線:即便在超過2米的距離,也能提供精準的深度感知,這對大型采礦設備尤其關鍵。
堅固設計與校準保持:可以承受陽光、沖擊和多塵環境的考驗。
5GigE+PoE:提供可靠的高帶寬以太網連接,并支持長距離電纜,相比USB系統,這具有顯著優勢。
為AI提供RGBD輸出數據:立體圖像數據直接輸入Taiga的AI系統,用于物體識別和抓取點估計。
系統運行
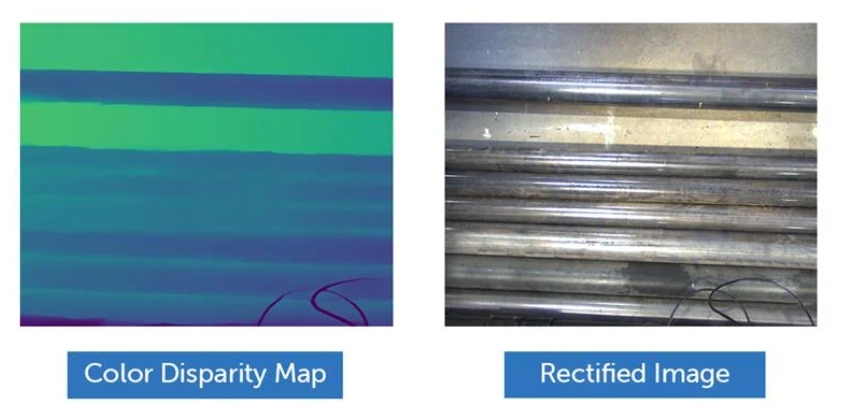
Bumblebee X提供的校正圖像和深度圖展示了自主操作鉆桿的精確檢測與深度估計。
在Taiga的桿操作系統中,核心部分是一臺配備了Bumblebee X的機器人起重機。這款立體相機捕捉高分辨率的圖像對,數據經過神經網絡處理后,執行以下任務:
識別散落在地面上的鉆桿
估算抓取點和最佳拾取位置
觸發機器人臂的自主運動規劃和控制
整個視覺和控制系統在一臺堅固的AMD V1806邊緣AI計算平臺上運行,相機通過一根5米長的以太網電纜與PoE(以太網供電)與平臺連接。Taiga的Synapse平臺借助Spinnaker SDK和基于ROS的處理流暢來協調系統,確保機器人能夠自主、穩定地運行。并且,整個過程無需編寫代碼。
通過Synapse與Bumblebee X的結合,Taiga Robotics能夠為礦業客戶部署現成的自主機器人系統。這些系統有效降低了安全風險,提高了生產效率,并為大規模工業任務帶來了卓越的精度表現。
憑借Teledyne的立體視覺技術,Taiga Robotics成功將礦業中極具挑戰性的人工操作作轉變為AI驅動的自動化任務,充分展示了AI技術在工業領域的巨大潛力。

Taiga視覺引導機器人系統運行的簡短演示
編輯精選


